Yuichi Kurita, Human Systems Augmentation (HuSA) Lab.
HUMAN MODELING AND AUGMENTATION RESEARCH GROUP (Prof. Yuichi Kurita Laboratory)
MEMBERS in 2025
STAFF
|
|
PAST RESEARCH TITLES OF DOCTORIAL/MASTER/BACHELOR THESIS
2024 Doctoral Dissertation
2024 Master thesis
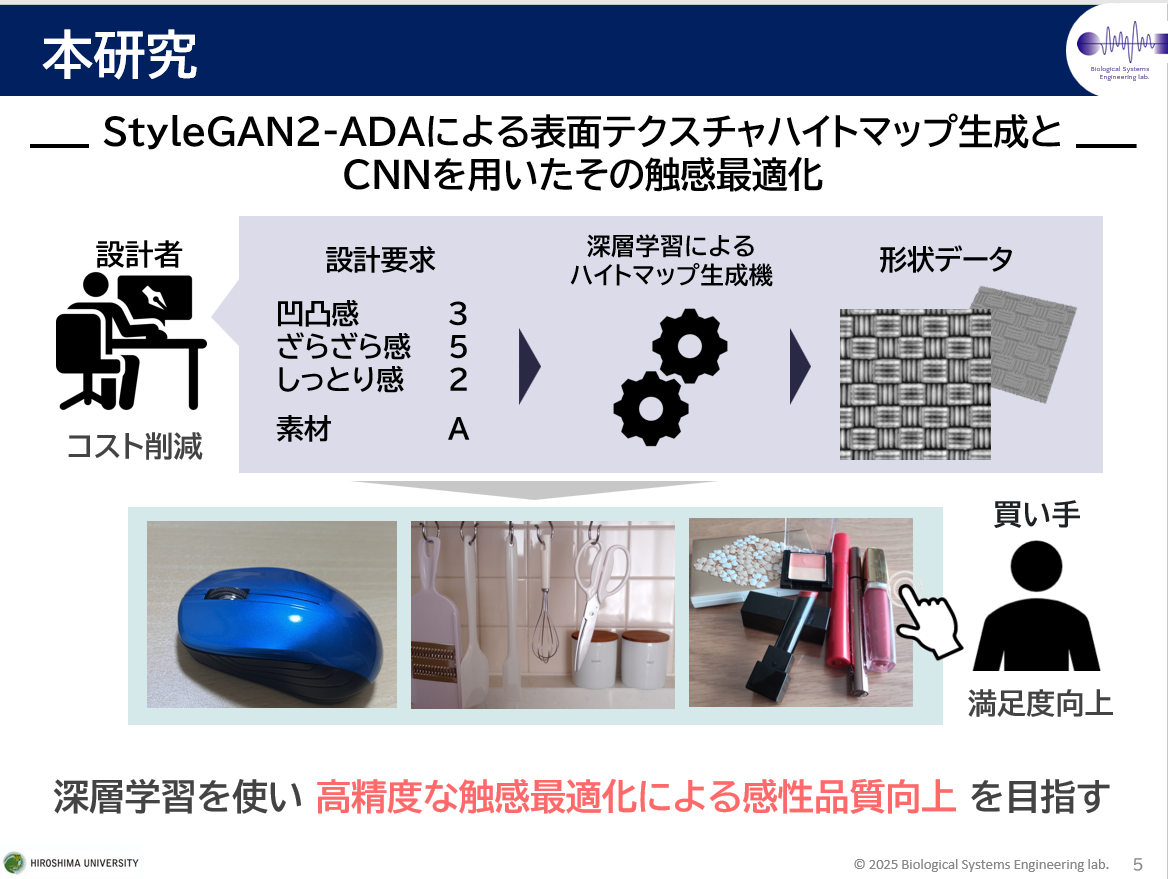
- Hiroski Nakanishi, Surface Texture Heightmap Generation with StyleGAN2-ADA and Tactile Sensation Optimization Using CNN (Graduated on March 2025)
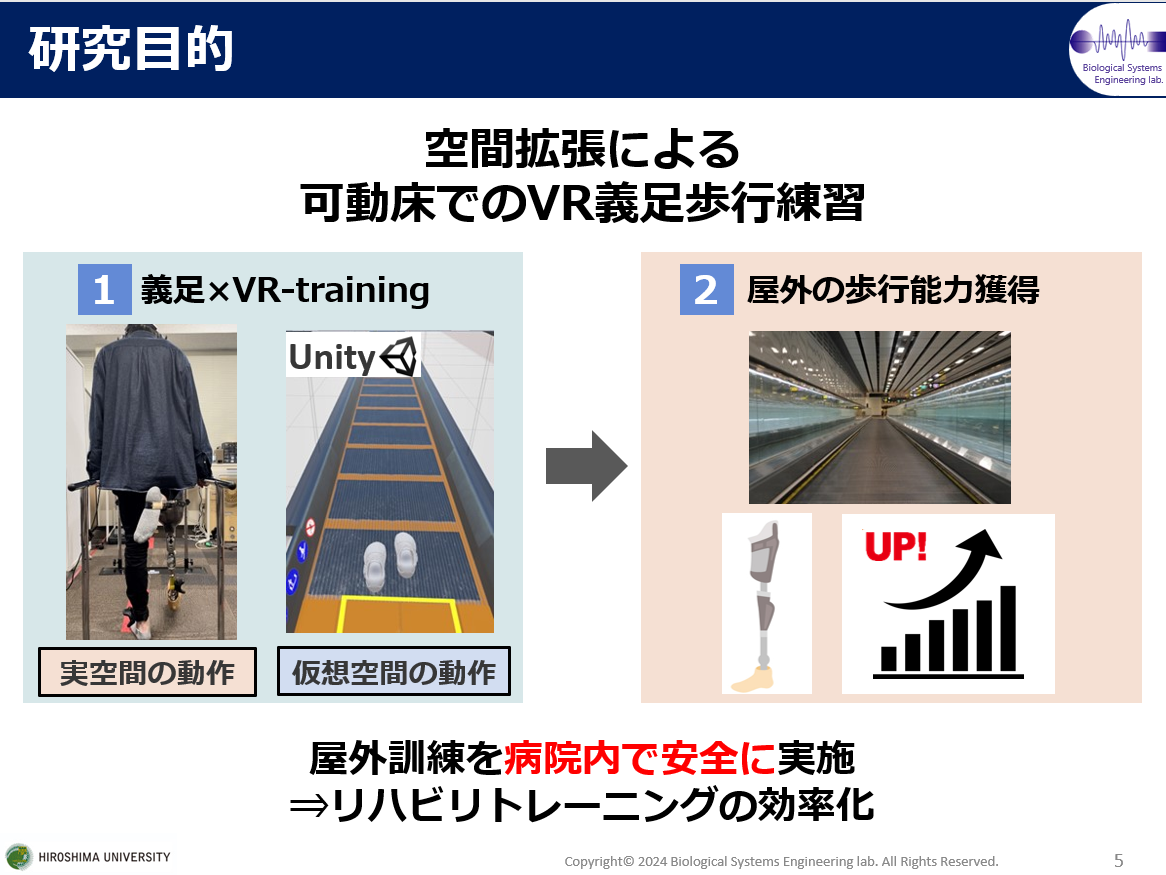
- Kota Nakagawa, Prosthetic leg walking training system using a movable floor reproduced in VR space (Graduated on March 2025)
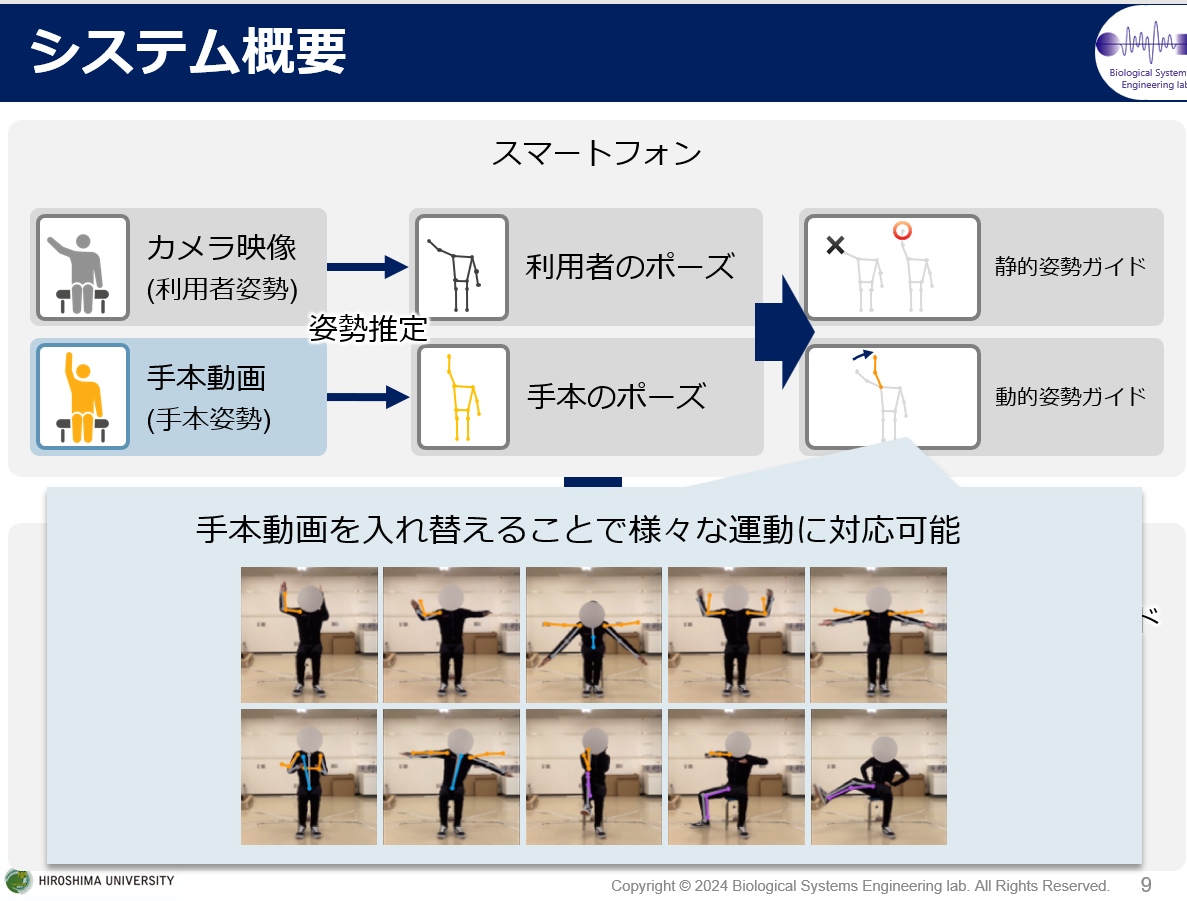
- Yuma Takeda, Development of an Exercise Support Application with Dynamic Posture Guidance Using Monocular Camera Pose Estimation (Graduated on March 2025)
- Keigo Isoshima, Development of boot-type disturbance-adding equipment using pneumatic gel muscles (PGM) for fall prevention training (Graduated on March 2025)
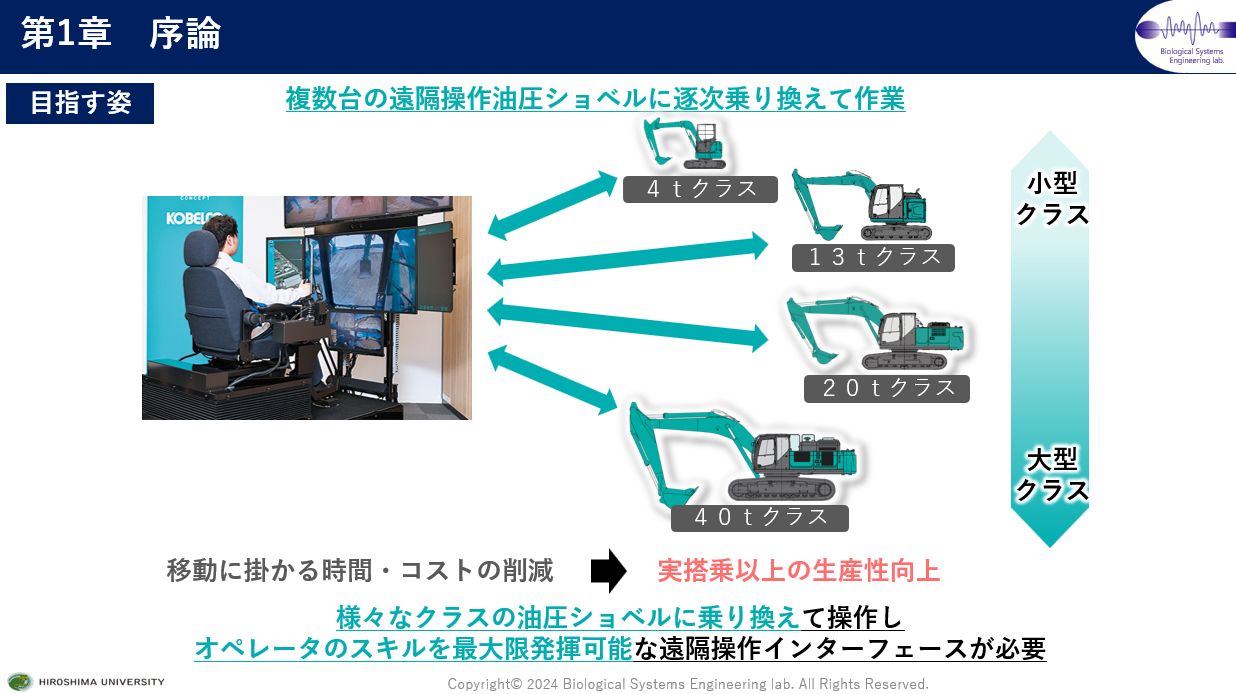
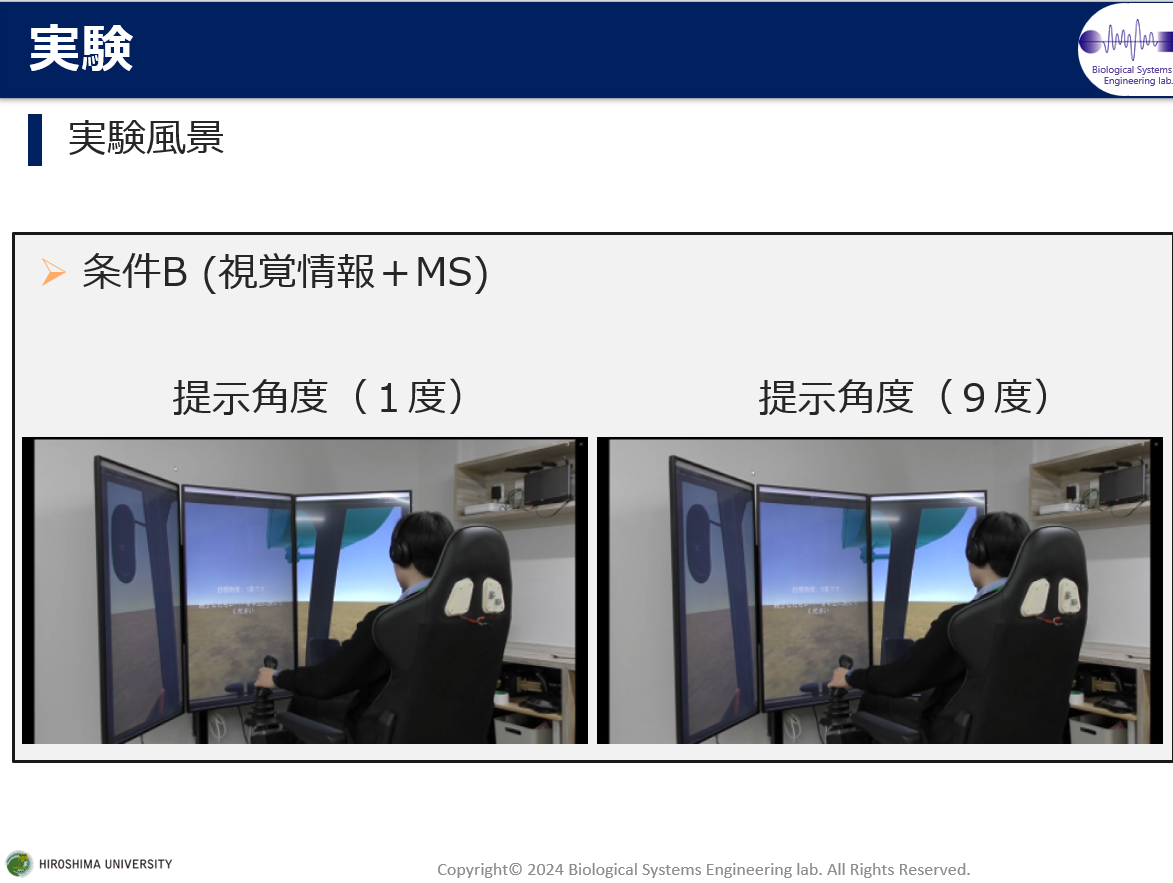
- Tatsuya Ueta, Effect of Motion Seat Information Presentation on Tilt Perception in? Hydraulic Excavators for Teleoperated Excavators (Graduated on March 2025)
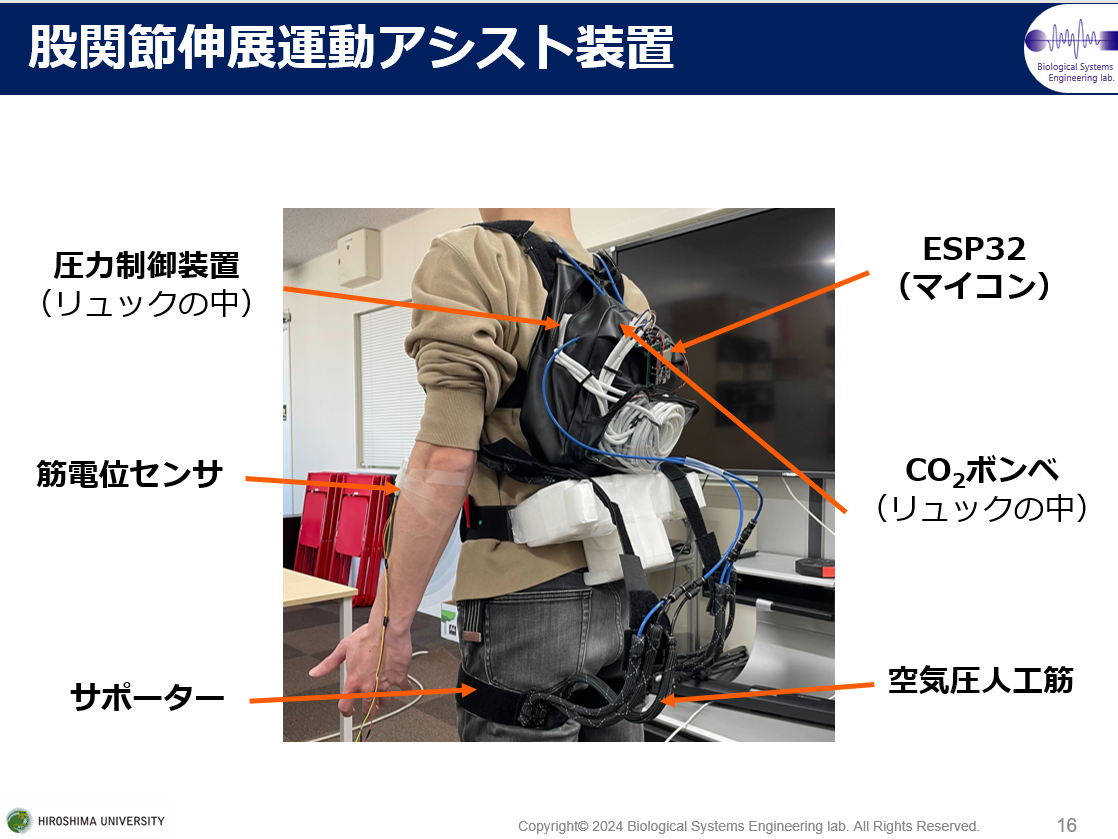
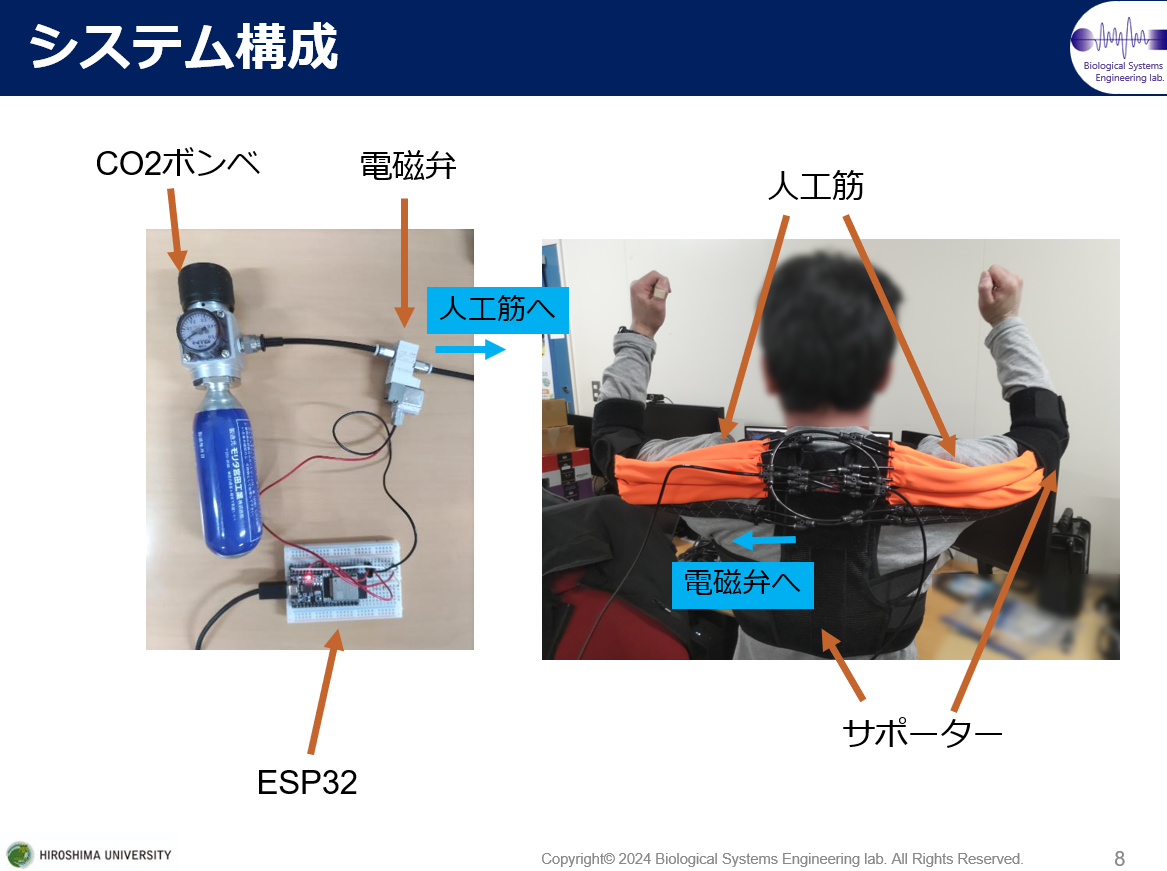
- Hidenori Iwamoto, Development of an artificial muscle assist device to reduce the mental load on people (Graduated on March 2025)
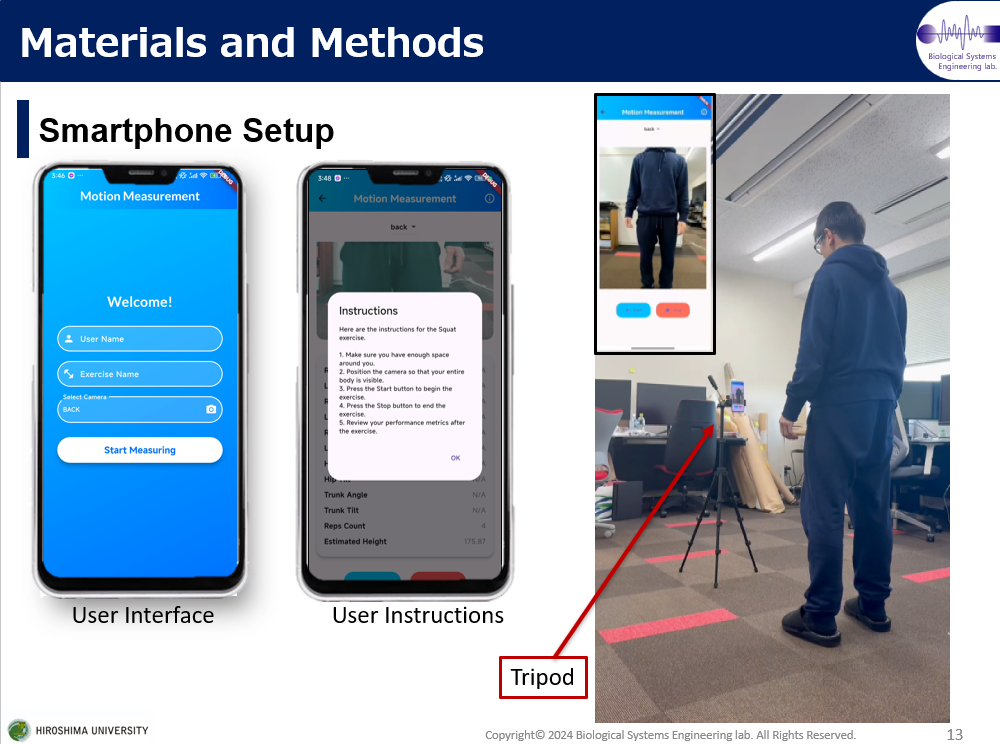
- NESMA MOHAMED EZZAT AHMED Development of a Smartphone-Based Motion Evaluation App: Realtime Multi-Joint Analysis for Enhanced Rehabilitation Monitoring (Winning Excellent Hiroshima University Student Scholarship) (Graduated on March 2025)
2024 Bachelor thesis
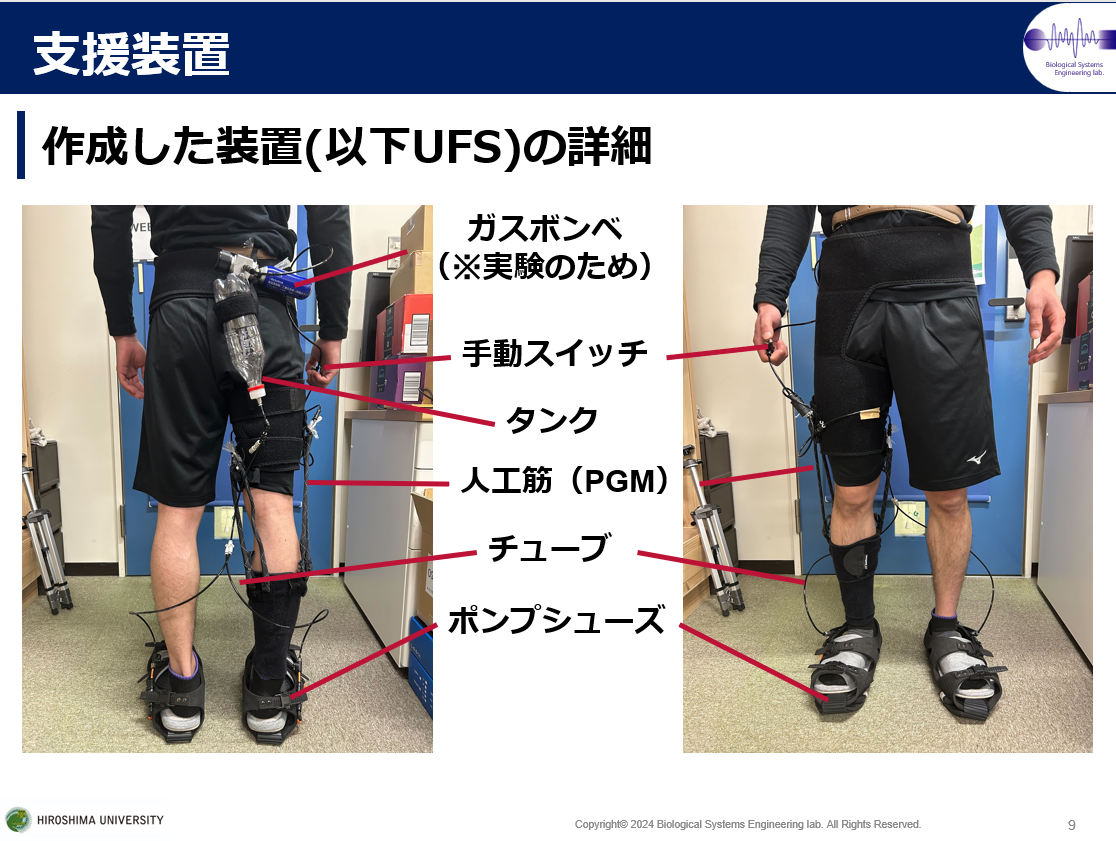
- Hinata Teramoto UPS for Stair:A stair-climbing support suit with an energy harvesting mechanism that uses the wearer's own body weight (Graduated on March 2025)
- Ouga Kawabe, Development of muscle training equipment using artificial muscle load (Graduated on March 2025)
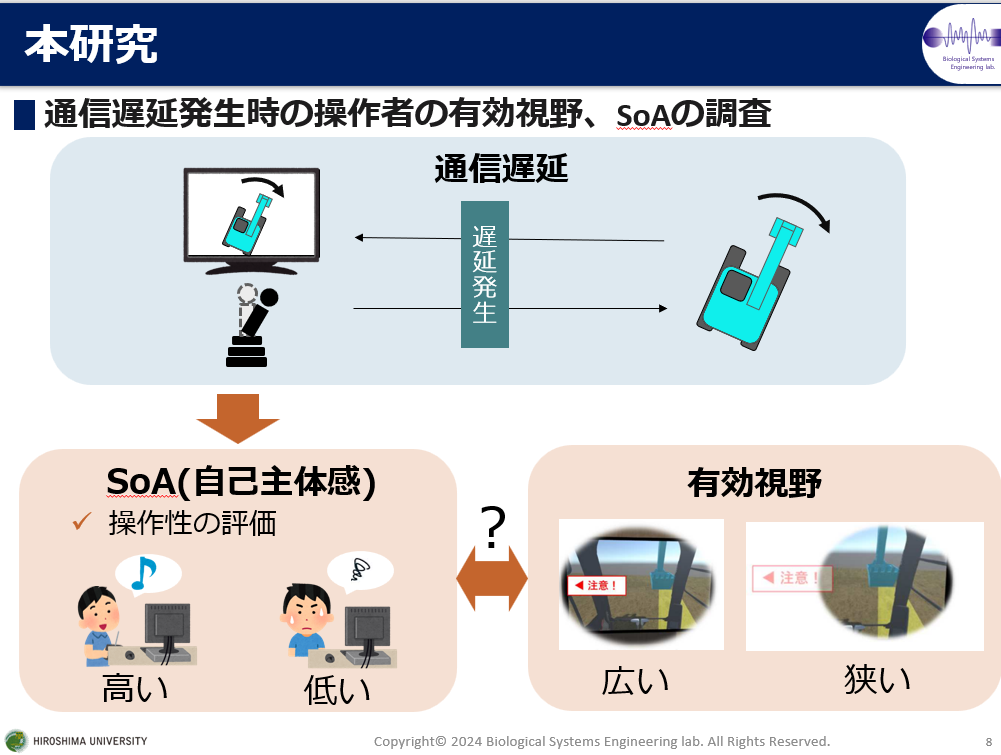
- Natsumi Morikawa, The impact of communication delays when operating remote hydraulic excavators on effective field of view and SoA (Graduated on March 2025)
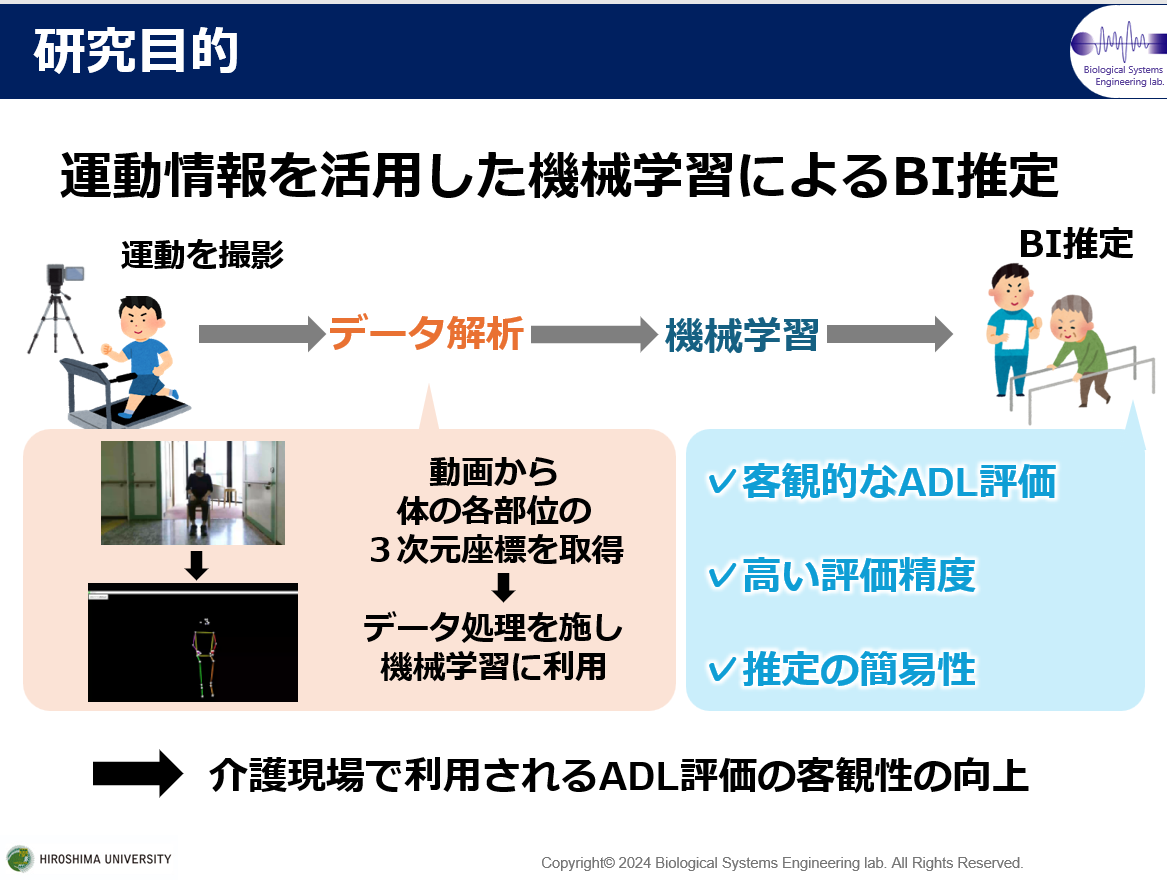
- Kanta Iwahara, Estimation of the barthel index using machine learning with motion information (Graduated on March 2025)
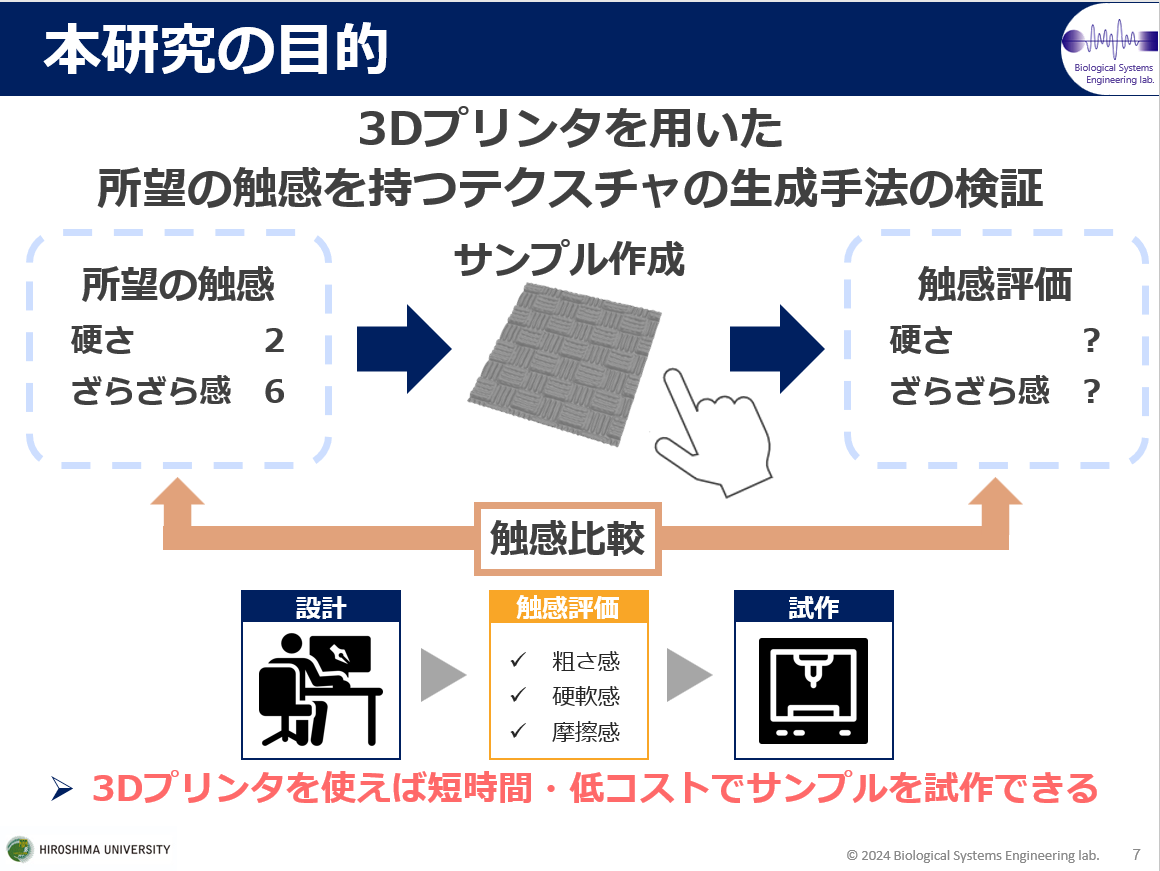
- Yuichi Nakano, Verification of a method for generating textures with the desired tactile feel using a 3D printer (Graduated on March 2025)
2023 Doctoral Dissertation
-
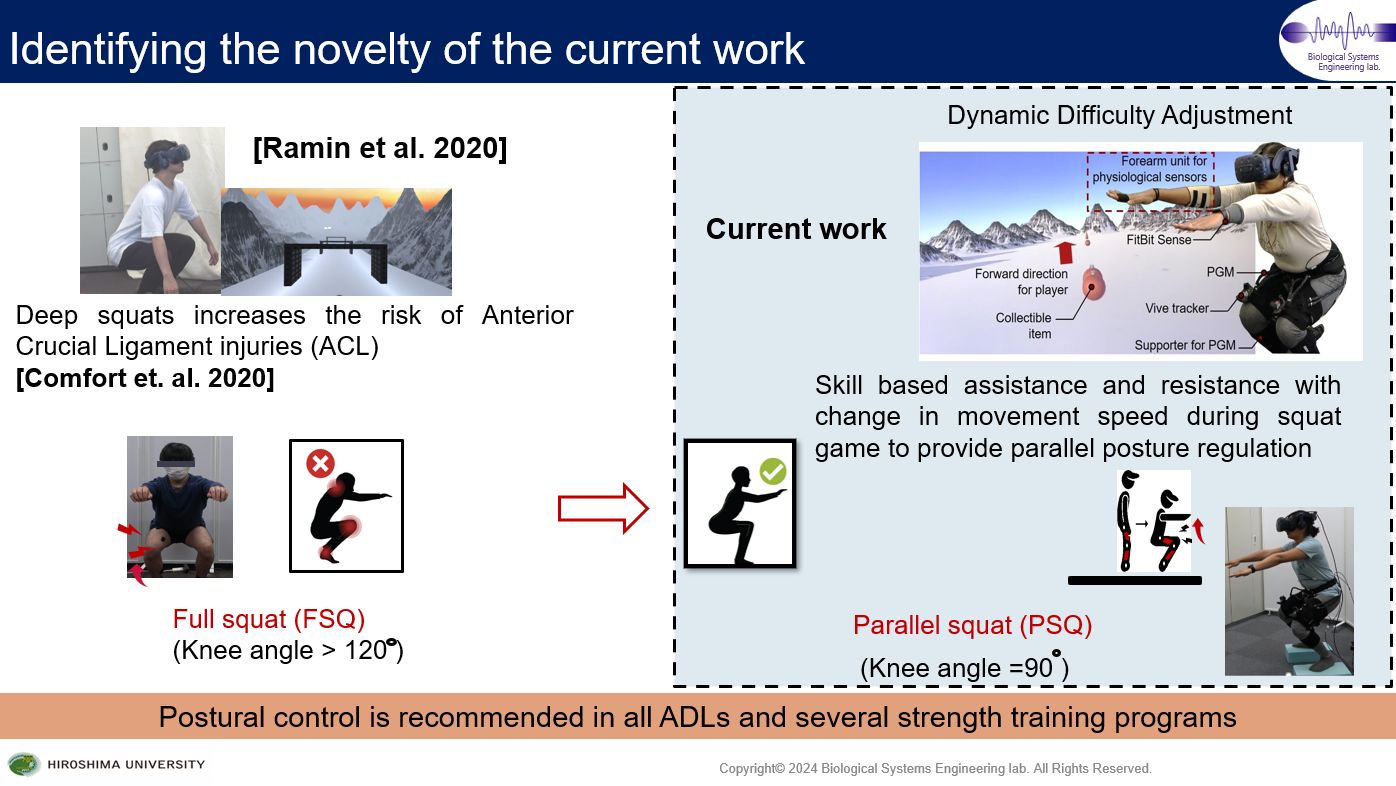
Priyanka Ramasamy,
Force feedback-based Gamification: Squat Exergame Using Soft Actuators-based Lower Limb Suit and Difficulty Adjustment Algorithms
(Winning Excellent Hiroshima University Student Scholarship) (Graduated on March 2024)
2023 Master thesis
-
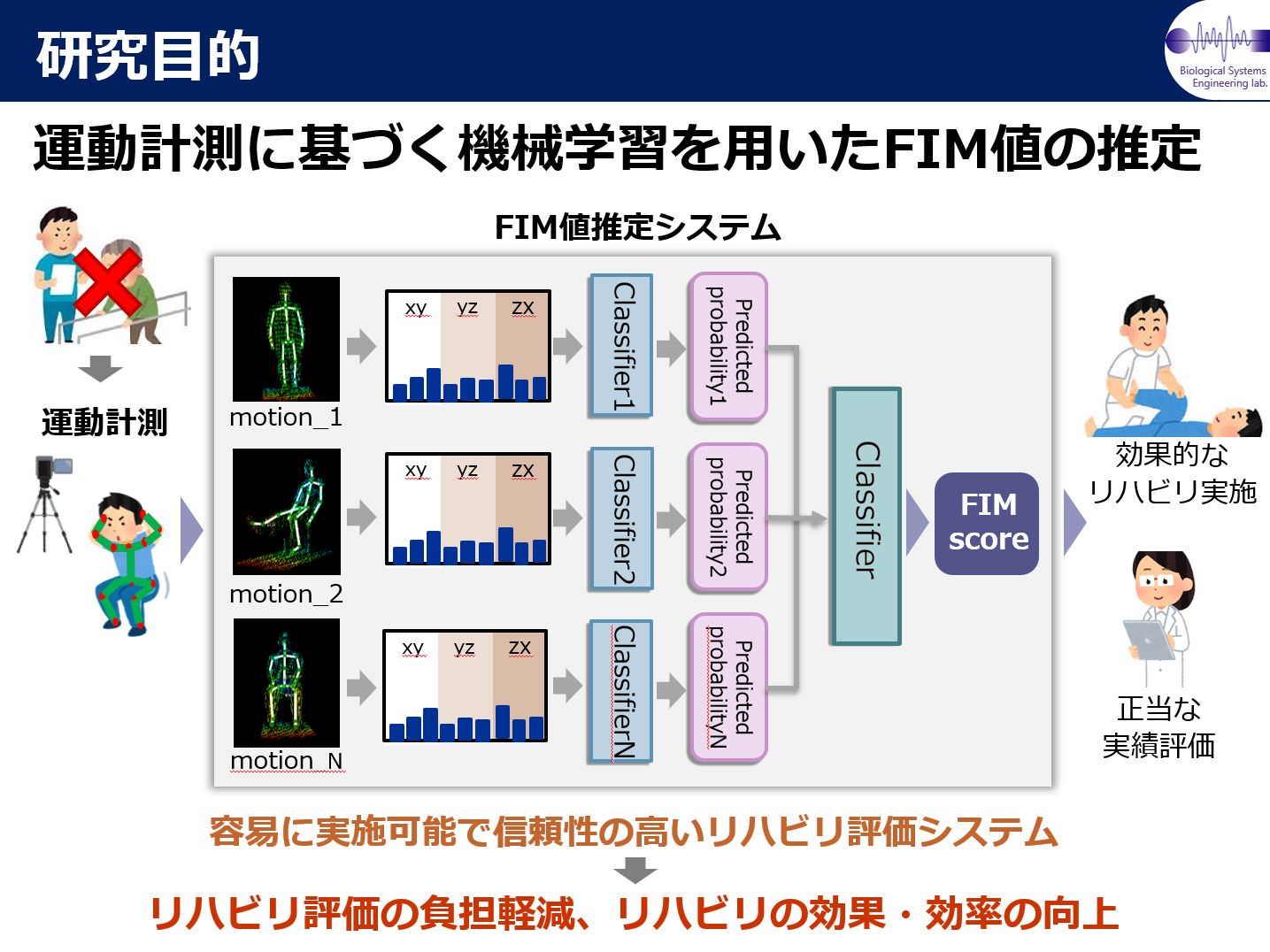
Shino Matsuura,
Estimation of FIM values using machine learning based on movement measurements
(Winning Excellent Hiroshima University Student Scholarship) (Graduated on March 2024) - Enrique Sastre Calderon, RAPID: Reaction time Acceleration PGM-based Improvement Device (Graduated on Sep.2023)
- Gunarajulu Renganatha, Analyzing the relationship between kinetic and lumbopelvic rhythm for dynamic range of motion using biomechanical modelling (Graduated on Sep.2023)


2023 Bachelor thesis
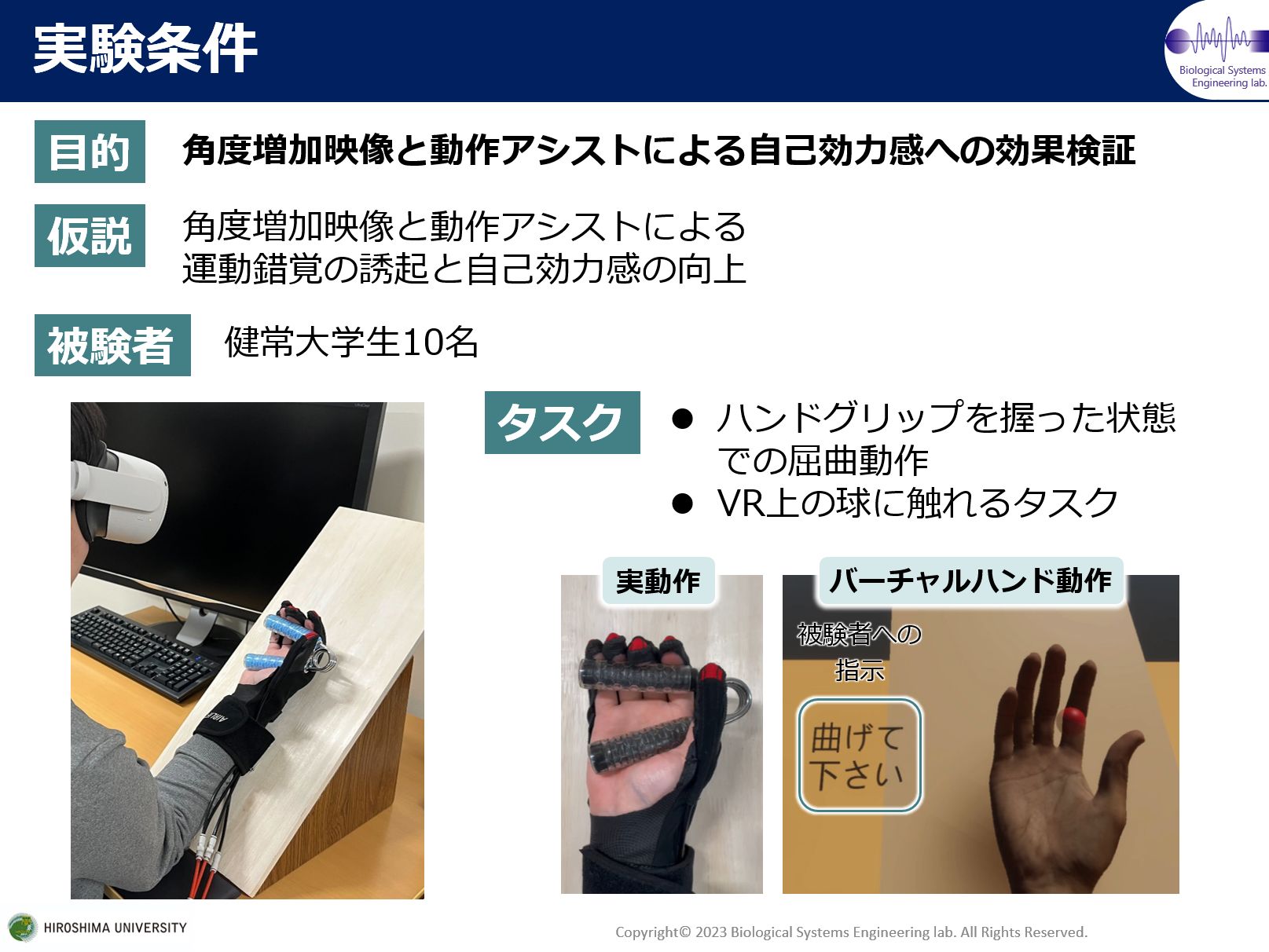
- Katsuya Inoue, Effects of a finger training support system with simultaneous visual and force sensory feedback on on the self-efficacy (視覚と力覚の同時提示による手指トレーニング支援システムが自己効力感に与える影響) (Graduated on March 2024)
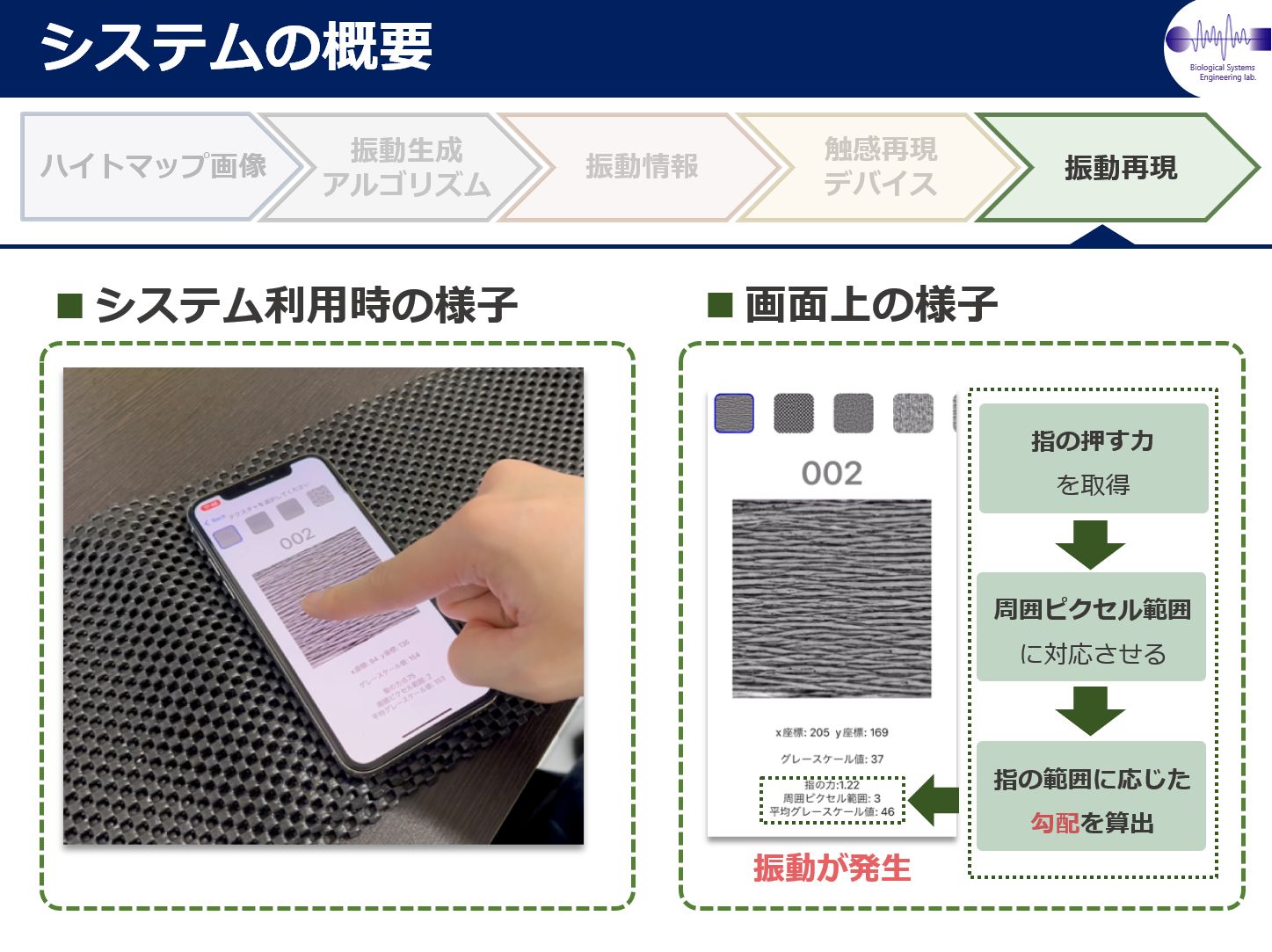
- Yuki Miyzaki, Haptic display through vibration generation from 2D texture data (2次元テクスチャデータからの振動生成による触感再生) (Graduated on March 2024)
- Kotaro Fujihara, Teleoperation system that changes operability in response to expansion and contraction of field of view (視野の拡大・縮小に対応して操作性が変化する遠隔操作システム) (Graduated on March 2024)
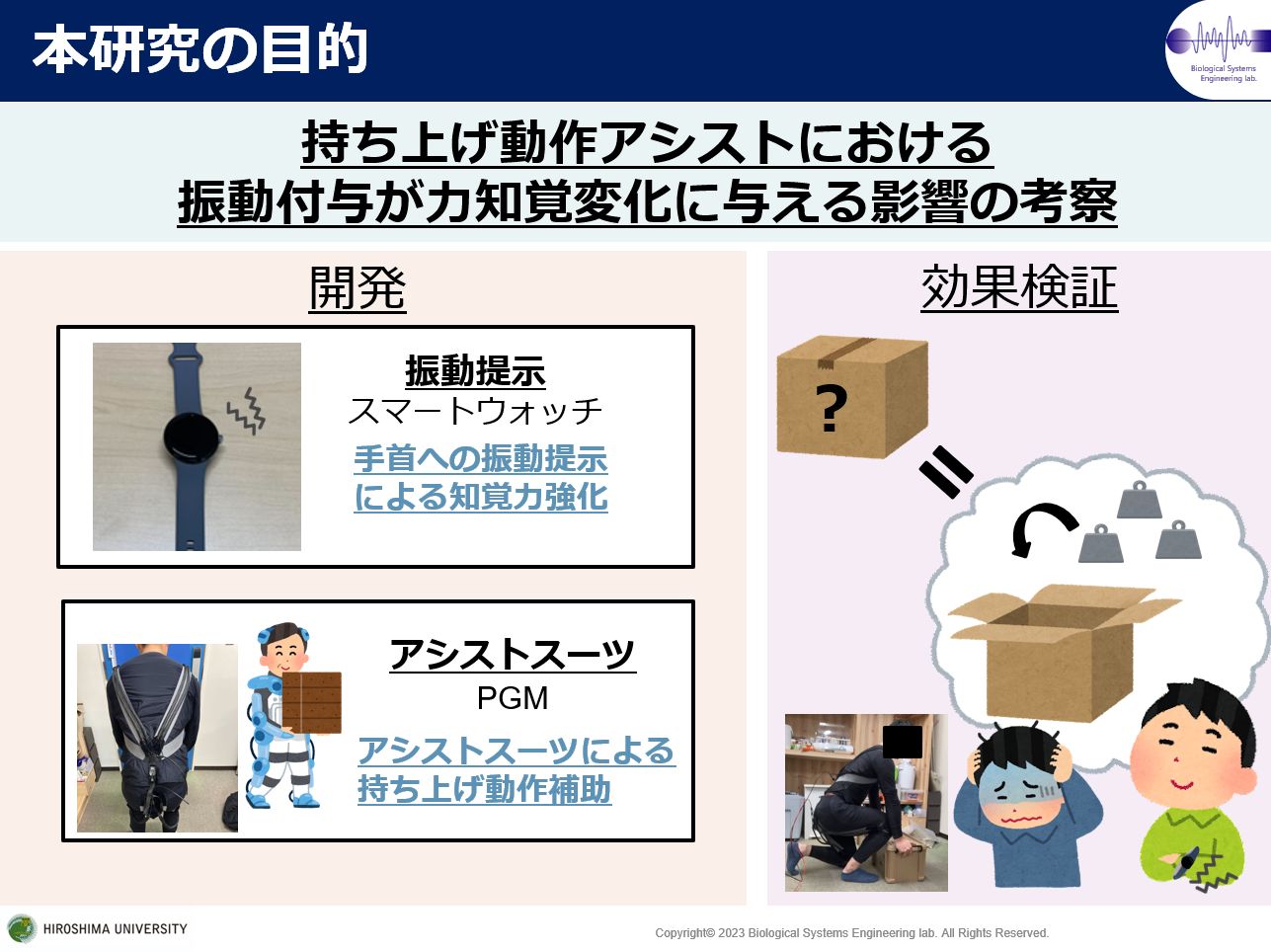
- Tatsuya Kiyoshi, Influence of Vibration on Force Perception Change in Lifting Motion Assist (持ち上げ動作アシストにおける振動付与が力知覚変化に与える影響の考察) (Graduated on March 2024)

2022 Master thesis
- Kai Ikeda, Influence on kinesthetic illusion by simultaneous visual and force feedback for finger movement rehabilitation (Graduated on Mar.2023)
- Taichi Tamai, Consideration of the effect of vibration presentation on the perception of assist force during isometric wrist extension motion (Graduated on Mar.2023)
- Junya Masunaga, Effect of Switching from a Teleoperated Excavator with Different Size on Work Efficiency (Graduated on Mar.2023)
- Takuma Kanemoto, A Proposal of Height Map Image Generation Method with Desired Tactile Feeling Based on Image Features (Graduated on Mar.2023)




2022 Bachelor thesis
- Tatsuya Ueda, Influence of swing operation difficulty of remote hydraulic excavators on operator stress (Graduated on Mar.2023)
- Taiju Nakanishi, Surface texture tactility estimation based on height-mapped image features and subject attribute information (Graduated on Mar.2023)
- Kota Nakagawa, Simultaneous visual and force sensory feedback on of stair descent sensation (Graduated on Mar.2023)
- Keigo Kawamoto, Development of balance training device by disturbing the ankle with artificial muscles (Graduated on Mar.2023)
- Yuma Takeda, Development of a mobile application to support gymnastics and increase motivation to exercise (Graduated on Mar.2023)





2021 Doctoral Dissertation
- Ryota Sekizuka, Development of Operation Training System and Improvement of Operation Interface for Improving Operators' Skills of Hydraulic Excavators

2021 Master thesis
- Kyoji Imaoka An Evaluation Method of Tactile Feeling by Using the Subband Height Map Based on Discrete Wavelet Transform
- Mutsuki Okawa Superimposition of the Predicted Attachment Positions Based on a Dynamic Model of Hydraulic Excavator Represented by a Second-Order Delay System
- Takumi Okumura Development of Stair Climbing Training System Using Visual Virtual Reality Display
- RAMASAMY, Priyanka; SquatEx: A Squat Exergame using Pneumatic Gel Muscle-based Dynamic Difficulty Adjustment.
- WONGCHADAKUL,Velika; SmartAidViewJacket: Studying the Effect of Deceptive Visual Feedback on Wearable Assistive Force Perception.





2021 Bachelor thesis
- Ryohei Kohama, Manipulation of Sense of Effort in Weight Holding by Force Intervention Using Artificial Muscles
- Shino Matsuura, Relationship Between Physical Function and FIM Scores based on Kinematic Measurements
- Masahiro Morita, Development of a Remote Lever-Operated Interface to Reduce Cognitive Burden Caused by Mental Rotation.



2020 Doctoral Dissertation
- Swagata Das, ForceArm - a wearable pneumatic gel muscle (PGM)-based assistive suit for the upper limb (Graduated on Oct.2021)
- Masaru Ito, Cross-platform cockpit system for tele-operated excavators with multimodal feedback (Winning Excellent Hiroshima University Student Scholarship (Graduated on Mar.2021)


2020 Master thesis
- Kenta Kishishita, Effect of Surface Textures on Fingertip Force Perception and Output (Graduated on Mar.2021)
- Masato Hamada, Development of the Balance Ability Evaluation Suit Using Pneumatic Artificial Muscles (Graduated on Mar.2021)
- Mayuko Minakata, Safe Walking Route Recommender Based on the Fall Risk Calculation by Using a Digital Human Model and Point Cloud Data (Graduated on Mar.2021)



2020 Bachelor thesis
- Junya Masunaga, Impact of switching on remote controlled hydraulic excavators on work efficiency (Graduated on Mar.2021)
- Kai Ikeda, Neuro-rehabilitation support system with simultaneous feedback of force and vision (Graduated on Mar.2021)
- Takuma Kanekoto, Relationship between spatial frequency band of texture and subjective evaluation of roughness (Graduated on Mar.2021)



2019 Doctoral Dissertation
-
Yusuke Kishishita,
Development of the Perceived Force Prediction Method and Application for Force-Feedback Technology based on Muscle Activity
(Winning Excellent Hiroshima University Student Scholarship ) (Graduated on Mar.2020) -
Thakur Chetan Prakash,
Adaptive Assist Control Based on Impedance Model of Pneumatic Gel Muscle and Its Application in Augmented Walking Suit
(Winning Excellent Hiroshima University Student Scholarship) (Graduated on Mar.2020)


2019 Master thesis
- Masahiro Fukada, A Study of the Relationship Between Tactile Feeling and Surface Texture in Free Touch Movement (Graduated on Mar.2020)
- Yuya Ishibashi, Gesture Recognition Considering Motion Variation Using Signal Dependent Noise (Graduated on Mar.2020)
- Wataru Sakoda, Squat Training System to Change Load Based on Locomotive Risk Level Prediction (Graduated on Mar.2020)
- Kazushi Matsumura, A Study on Effect of Delay in Swinging Operation of a Hydraulic Excavator (Graduated on Mar.2020)




2019 Bachelor thesis
- Takumi Okumura, Presentation of virtual stair climbing sensation using force feedback by artificial muscles (Graduated on Mar.2020)
- Kyoji Imaoka, Measurement of sliding state in tracing motion by a 6-axis force sensor for haptic evaluation (Graduated on Mar.2020)
- Mutsuki Okawa, Operation support for remote-controlled excavators by superimposing the predicted attachment position (Graduated on Mar.2020)



2018 Doctor thesis
- Kazuyuki Ogawa, Development of a Lightweight Flexible Motion Assist Suit Using Pneumatic Artificial Muscles (Graduated on Mar.2019)
- Masataka Yamamoto, Effect of resistive moment of ankle foot orthosis on gait, (Graduated on Sept.2018)


2018 Master thesis
- Ryota Sekizuka, An operation skill evaluation system of a hydraulic excavator using remote controlled excavator with augmented reality (Graduated on Mar.2019)
- Taiju Shizuno, Proposal of tactile mel scale and its application to the evaluation system of haptic sensation (Graduated on Mar.2019)
- Kosuke Tsuneyasu, Pressure control of pneumatic rubber artificial muscle installation work support suit considering burden feeling (Graduated on Mar.2019)
- Antonio, Vega Ramirez A soft exoskeleton jacket for human motion interaction (Graduated on Sept.2018)




2018 Bachelor thesis
- Kenta Kishishita, A system that virtually presents the feel of water spouting (Graduated on Mar.2019)
- Mayuko Minakata, Verification of contact detection accuracy in visualization system of body cleaning area by DhaibaWorks (Graduated on Mar.2019)
- Masato Hamada, Development of a walking assist device by ON-OFF timing control using artificial muscles (Graduated on Mar.2019)



2017 Master thesis
- Takuya Murata, Tremor prediction by the calculation of endpoint muscle activation compliance (Graduated on Mar.2018)
-
Takahiro Iikura,
Measurement and visualization of ground interaction information during city walking
(Graduated on Mar.2018)
/li>


2017 Bachelor
- Yuya Ishibashi, Development of a suit that assists lower limb movement using low-pressure driven pneumatic artificial muscles (Graduated on Mar.2018)
- Wataru Sakoda, Development of a bat swing enhancement suit with low-pressure driven pneumatic artificial muscles (Graduated on Mar.2018)
- Masahiro Fukada, Prediction of haptic feeling of surface texture based on vibration information (Graduated on Mar.2018)
- Kazuyuki Matsumura, Effect of visibility restrictions on the pointing operation of a hydraulic excavator (Graduated on Mar.2018)




2016 Master thesis
- Takuya Kasahara, Study on the Efficacy of Omnidirectional Images for a Laparoscopic Surgery (Graduated on Mar.2017)
- Yusuke Kishishita, Computational Prediction of Subjective Sense of Force in a Steering Wheel Operation based on Muscle Activity Estimation (Graduated on Mar.2017)
- Tsuyoshi Arakawa, Influence of the Contact Area Deformation at a Fingertip on Tactile Texture Evaluation (Graduated on Mar.2017)



2016 Bachelor thesis
- Ryota Sekizuka, A virtual operation experience system of hydraulic excavators by a radio controlled toy-excavator and AR presentation (Graduated on Mar.2017)
- Taiju Shizuno, Development of a fingertip contact surface measuring device using a transparent pseudo finger (Graduated on Mar.2017)
- Kosuke Tsuneyasu, A study on assist force design of a construction work support suit using pneumatic rubber artificial muscles (Graduated on Mar.2017)
2015 Master thesis
- Takaaki Ishikawa, Development of the Haptic Force Display by Electrical Muscle Stimulation (Graduated on Mar.2016)
- Yoshihide Otsuru, Haptic Enhanced Reality Method for Laparoscopic Surgery (Graduated on Mar.2016)


2015 Bachelor
- Yuki Koike, Evaluation and improvement of a suit that reduces the burden on the surgeon's muscles (Graduated on Mar.2016)
- Takuya Murata, Estimation of stiffness ellipse of the hand by a musculoskeletal model (Graduated on Mar.2016)
- Takahiro Iikura, Modification and presentation of walking sensation on road surface by adding vibration to shoe soles (Graduated on Mar.2016)
2014 Master thesis
- Akihito Kibita, Fingertip Force Estimation based on the deformation of the fingertip (Graduated on Mar.2015)
- Kohei Sakurada, Endpoint Compliance Based on Estimation of Muscle Activity by a Musculoskeletal Model (Graduated on Mar.2015) /li>
- Jumpei Sato, Development of a Wearable Sensorimotor-Enhancing Suit (Graduated on Mar.2015)



2014 Bachelor
- Tsuyoshi Arakawa, Grasp evaluation focusing on the surface change of the fingertip contact (Graduated on Mar.2015)
- Yusuke Kishishita, Development of a real-time muscle effort visualization system (Graduated on Mar.2015)
- Keita Takahashi, Evaluation of a motion support wear using a musculoskeletal model (Graduated on Mar.2015)
2013 Master thesis
- Masahiro Kiyooka, Force Display of a Palpation Motion by Using the Haptic Enhanced Reality Method (Graduated on Mar.2014)
-
Yamato Sueda,
Surgical Grasping Forceps with Sensorimotor Enhancement Capability
(Graduated on Mar.2014)
/li>


2013 Bachelor thesis
- Takaaki Ishikawa, Weight sensation display using an electrical muscle stimulation (Graduated on Mar.2014)
- Yoshihide Otsuru, Development of a training system for laparoscopic surgery using haptic augmentation technology (Graduated on Mar.2014)
- Masaya Kondo, Interface design method considering the muscle effort (Graduated on Mar.2014)
2012 Master thesis
- Hiroyuki Otsuka, Haptic rendering by augmenting virtual force on the force response of a base object (Graduated on Mar.2013)

2012 Bachelor thesis
- Akihito Kibita, Estimation of the fingertip force using a slip perception model (Graduated on Mar.2013)
- Kohei Sakurada, Motion evaluation considering signal dependent noise in muscle activity (Graduated on Mar.2013)
- Jumpei Sato, A study on sensitivity evaluation based on muscle force estimation using a musculoskeletal model (Graduated on Mar.2013)
2011 Bachelor thesis
- Keiichi Sasaki, Exercise efficiency assessment using a upper limb musculoskeletal model (Graduated on Mar.2012)
- Yamato Sueda, A Study on Haptic Perceptual Sensitivity Enhancement by Stochastic Resonance Effect (Graduated on Mar.2012) /li>
Past staff
-
Ramasamy, Priyanka
Researcher Graduate School of Advanced Science and Engineering -
Chiaki Raima
Specially Appointed Assistant Professor, Digital Manufacturing Education and Research Center -
DAS Swagata
Specially Appointed Assistant Professor, Graduate School of Advanced Science and Engineering -
Masaru Ito
Associate Professor of a Collaborative Research Lab., KOBELCO Dream-Driven Research Center -
Masataka Yamamoto
Specially Appointed Assistant Professor, Graduate School of Advanced Science and Engineering
Interns
- November 2023 - March 2024: Pratyusha Reddy M., Development and validation of VR Staircase training device for rehabilitation applications
- May - September 2021: Gunarajulu Renganathan,Estimation of GAIT Kinematics of Flatfoot adult subjects with and without running shoe using OpenSim
- December 2018: Ganesh Roy, Indian Institute of Engineering Science and Technology, Shibpur (IIEST-S) , An Analysis of the Characteristics of PGM and Its Application as an Ankle Joint Exoskeleton
- November 2018: Saptak Bhattacherjee, Indian Institute of Engineering Science and Technology, Shibpur (IIEST-S) , Invoking Positive Emotion with Force and Vibrotactile Feedback
- November 2017: Ai Higuchi,Kyushu Institute of Technology, Development of a walking assist device using artificial muscles
- September 2016: Eichi Kaneko, Nagoya Institute of Technology, Evaluation of force sensing characteristics of vehicle's steering
- June - August 2016: Cassie Lowell, Harvard University, Developing a wearable wrist assist device