Yuichi Kurita, Biological Systems Engineering Lab.
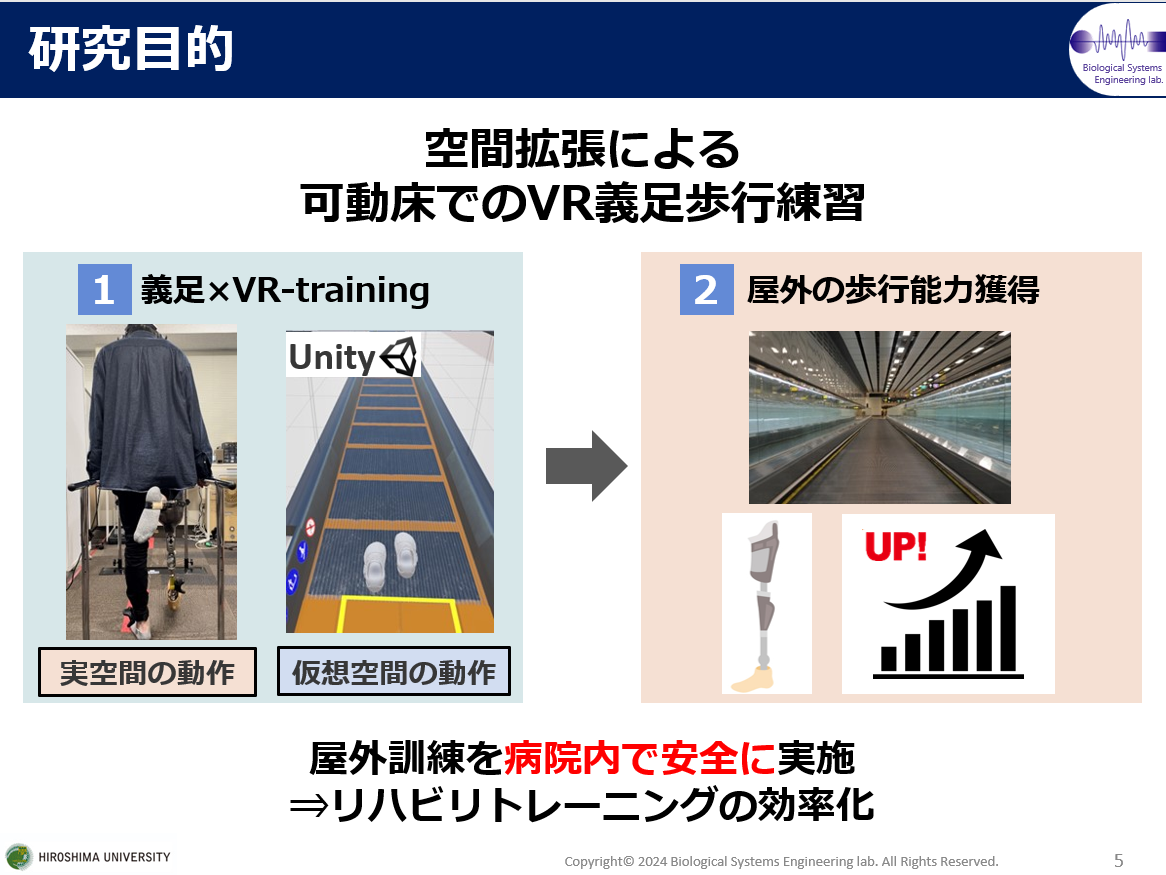
VR Prosthetic Leg Walking Practice on a Moving Floor with Space Expansion
VR空間で再現した可動床を利用した義足歩行トレーニング
中川 康太 (2025年3月博士前期課程修了)
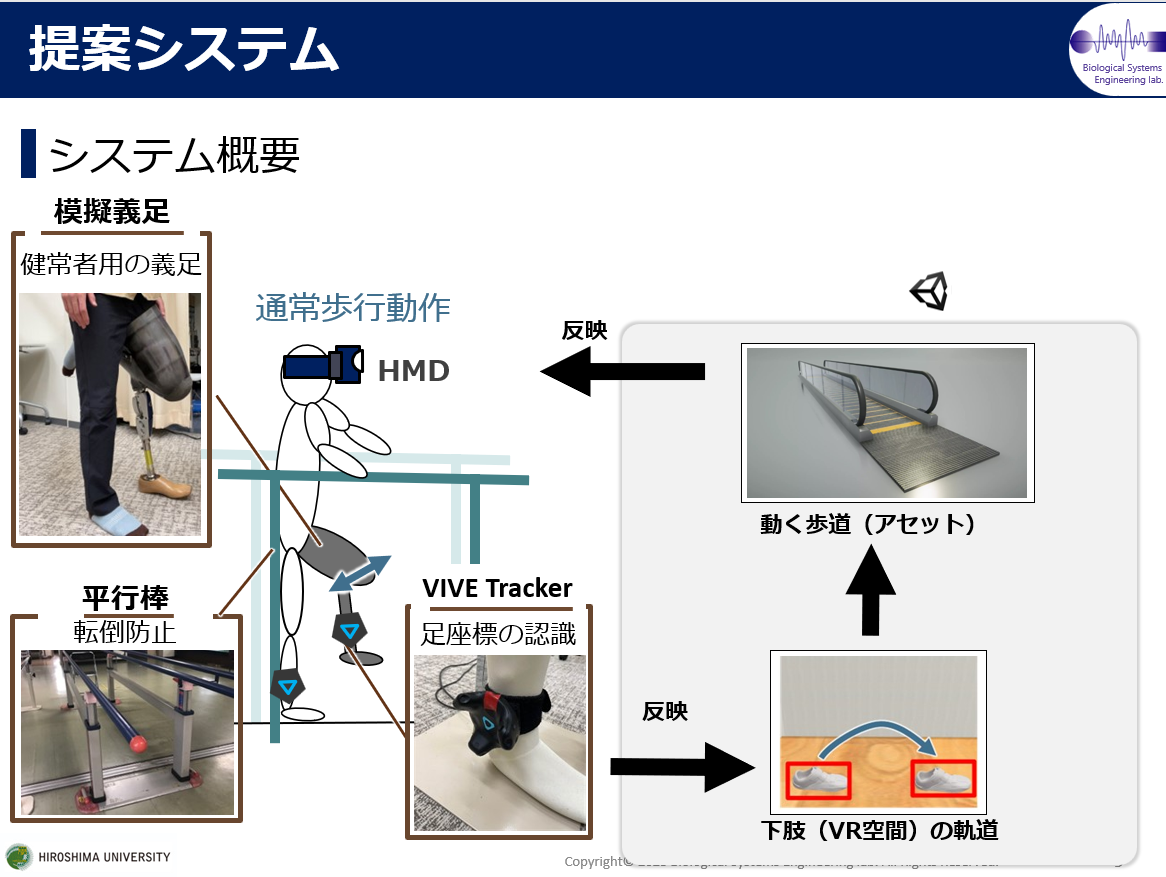
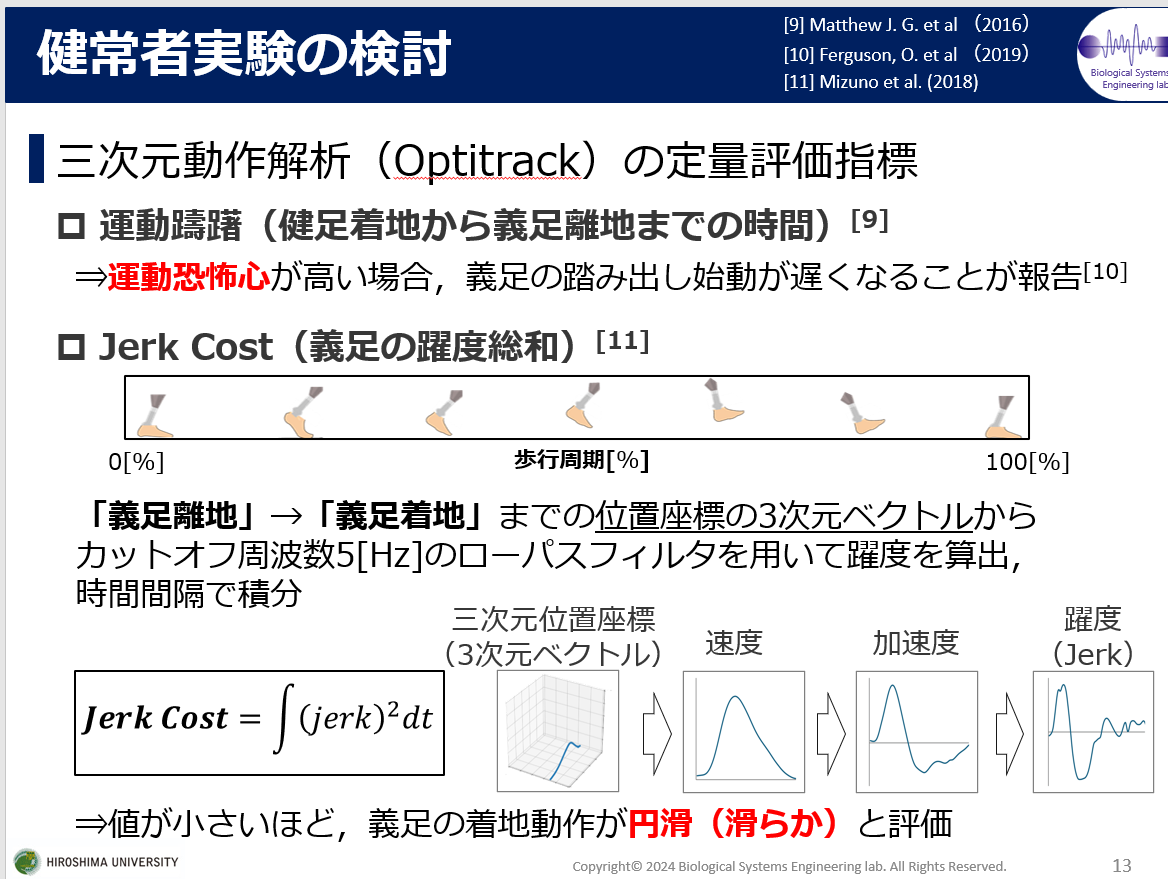
本研究の目的は,トラッキングと移動量の操作を用いてVR 空間内で動く歩道の乗り降りをトレーニングするシステムを構築し,システムが義足装着者の歩行能力の獲得に有効であるかを検証することである.効果検証として,健常者でも装着できる模擬義足を用いた5 日間の健常者実験により,VR トレーニング前後の歩行能力の解析によるシステムの有効性の確認と,VR 有のトレーニング群(VR 群)とVR 不使用のトレーニング群(Control 群)の群間比較を行い,従来トレーニングとの効果の比較を行った.The purpose of this study is to develop a system for training users to board and disembark from a moving sidewalk in a virtual reality (VR) environment, utilizing tracking and movement manipulation. Additionally, the study aims to assess whether the system effectively aids users with prosthetic legs in acquiring walking abilities. To evaluate the system’s effectiveness, we conducted a five-day experiment with able-bodied participants using a simulated prosthetic leg designed for them, confirming the system’s efficacy by analyzing walking abilities before and after VR training. Furthermore, we compared the effectiveness of our system with that of conventional training methods.