Yuichi Kurita, Biological Systems Engineering Lab.
Force feedback-based Gamification: Squat Exergame Using Soft Actuators-based Lower Limb Suit and Difficulty Adjustment Algorithms
Priyanka Ramasamy (2024年3月博士後期課程修了)
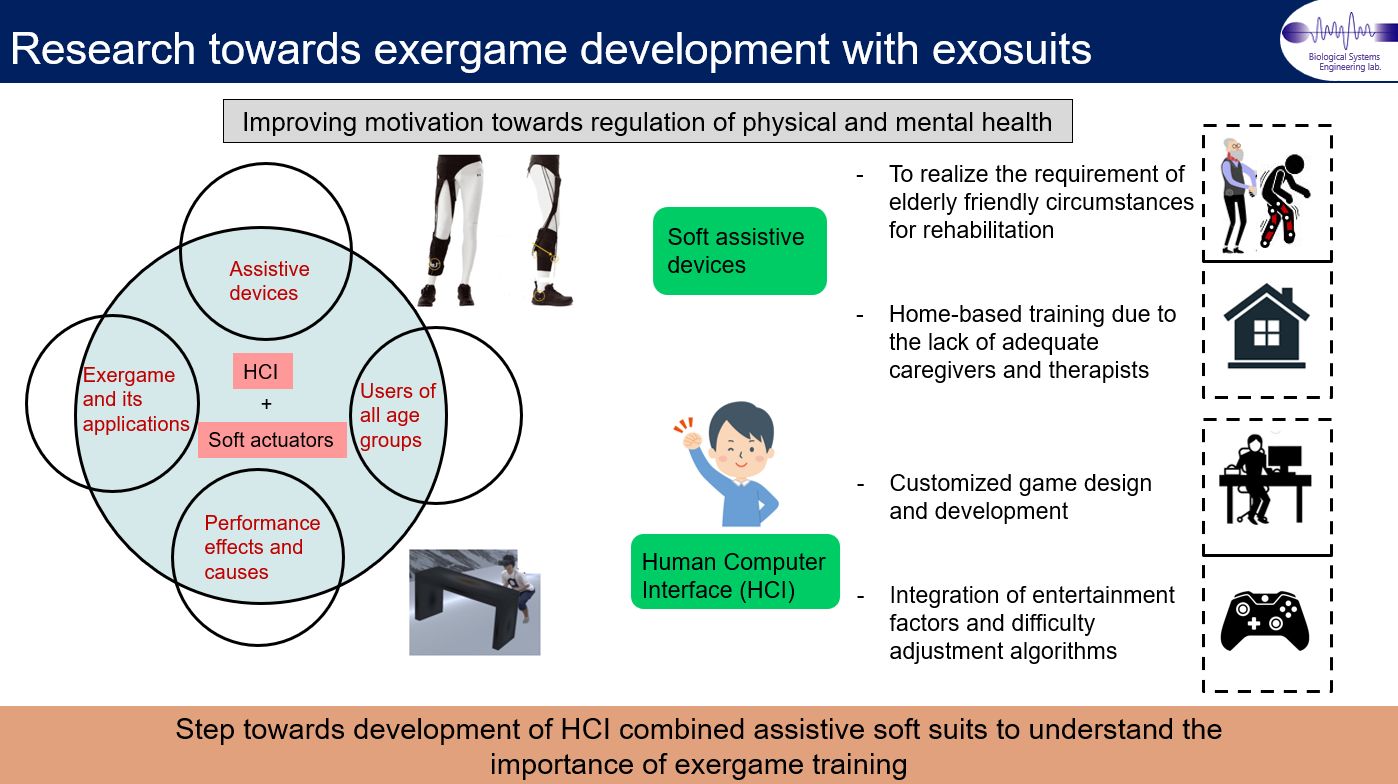
This thesis is a detailed work of the development and evaluation of an exercise-based game with squat motions while utilizing the soft wearable suit for the lower limb. The soft actuator-based lower limb suit is used to introduce the concept of game difficulty algorithms incorporating the novel specifications of optimizing the pace and progression to maintain the squat posture. The knee features and muscle unloading effects were assessed to verify its feasibility and interesting outcomes were obtained. The structure of the thesis is as follows:In Chapter 1, we discuss the detailed study of background on exergames and human augmentation utilizing soft robotics. The background section is followed by a discussion on the motivated aspects that are directed to initiate this research. Then, we discuss the previous studies associated with this research classified into exergame-based training and soft exoskeletons for the lower extremity. The second classification is broadly divided into two ranges of applications in rehabilitation for enhancing physical health and mental motivations for enhancing cognitive health.
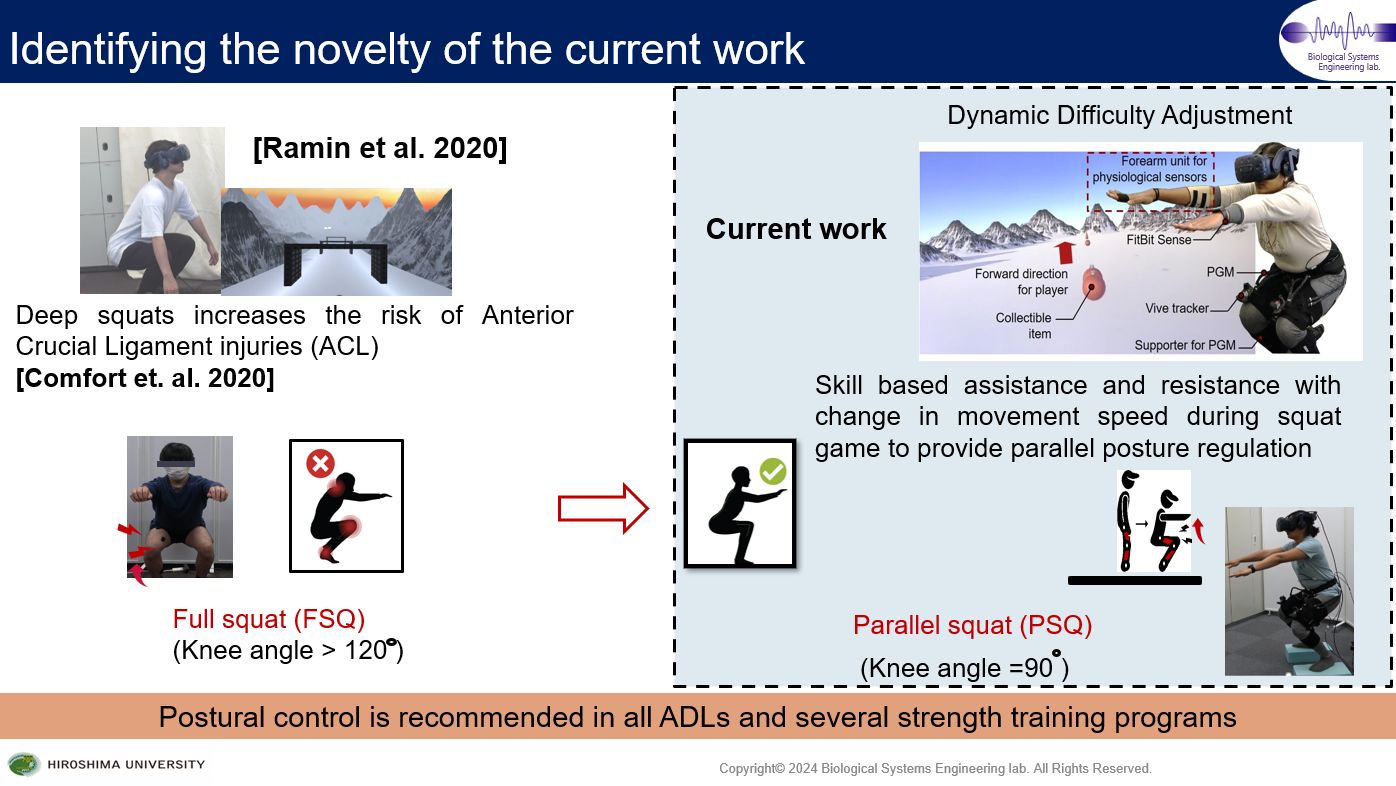
In Chapter 2, we discuss the biomechanics of the lower limb related to the squat cycle and novelty in the range of different specifications. Next, we will give a concrete explanation of the prototype evolution and various interfaces involved in designing the exergame module and control block. The exergame components and soft actuators widely called pneumatic gel muscles (PGMs) are discussed with the air-pressure relationships to understand the working principle of the low-pressure-based actuation.
In Chapter 3, we will discuss the different types of sessions considered for the evaluation of the exergame training. These training sessions will include the different states of squat motions, DOFs enabled during different angles of squat pose and the parameters that decide the user’s motion. The parameters considered were the knee kinematic features and the range of force exerted by the PGMs. The lower limb DOFs will also be discussed that are associated with the joint angles considered.
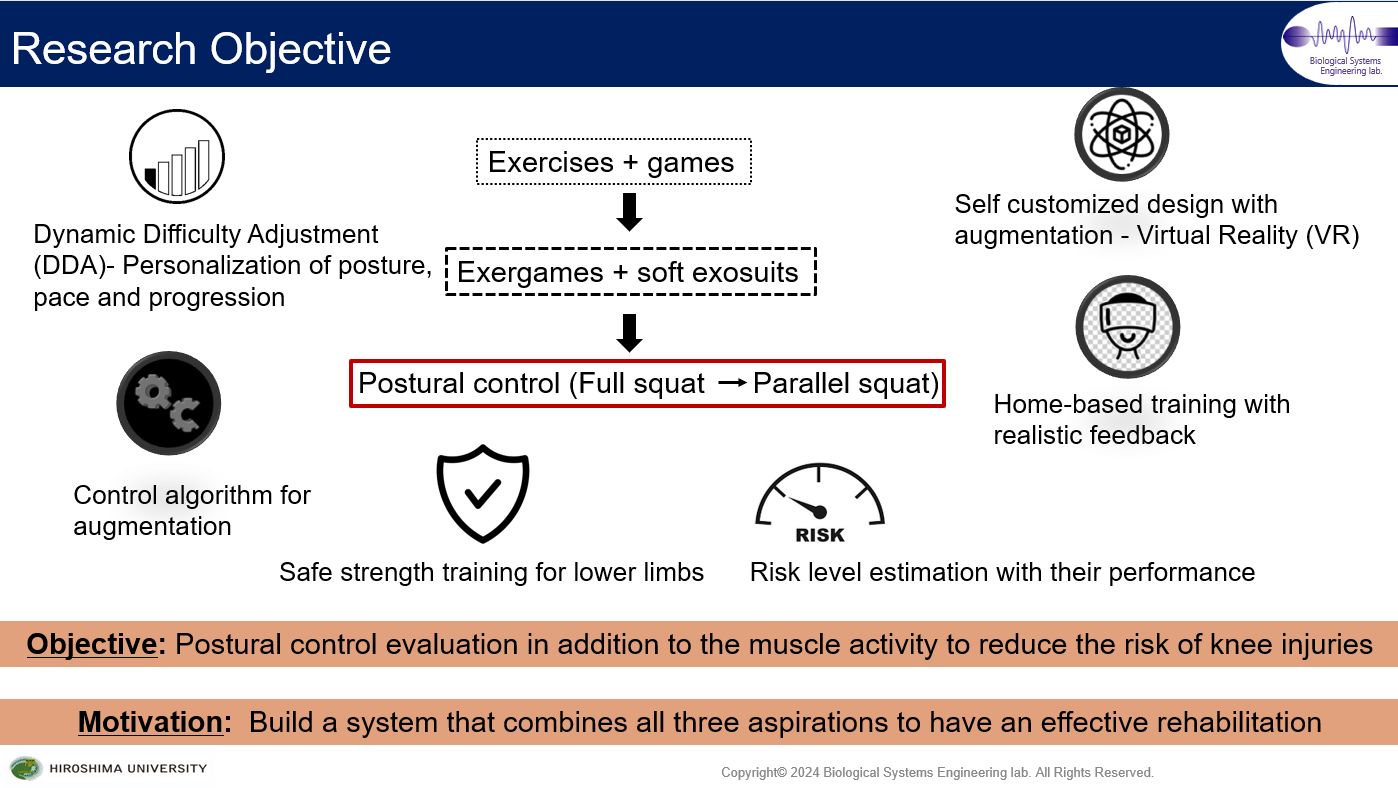
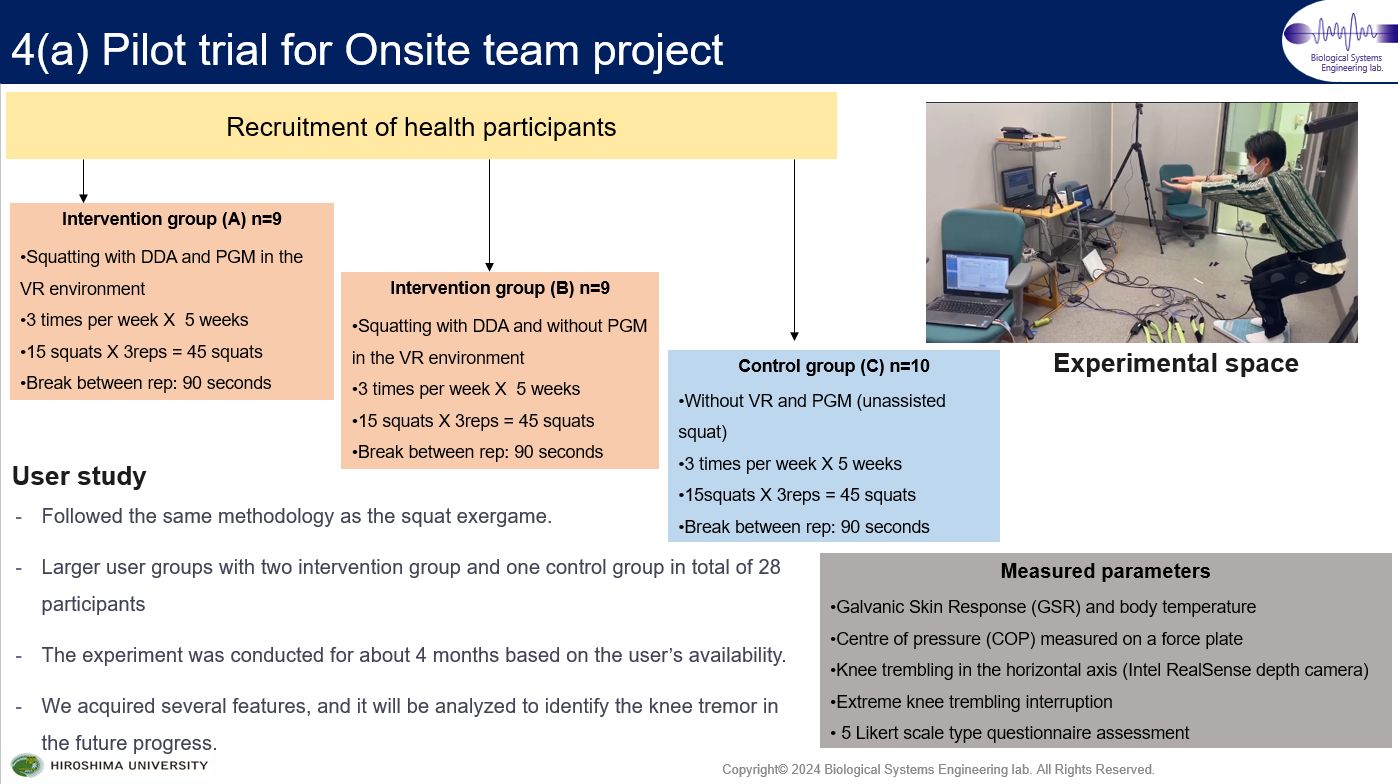
In Chapter 4, we evaluate the exergame training with a soft actuator-based lower limb suit based on three different factors that include knee kinematics, physiological characteristics and surface electromyography (sEMG) based assessment to verify the muscle unloading effects. The knee kinematics were considered to estimate the performance in terms of tremor and depth features of the squat posture maintenance for the healthy subjects. On the other hand, sEMG estimation was done to identify the muscle unloading aspects through the engagement of healthy subjects. We will also explain the control strategies proposed based on the sEMG and ground reaction force (GRF) assessment.
In Chapter 5, we make conclusive statements on our research studies completed and summarize the outcomes. In addition, we discuss the prospects of our work and several viewpoints on the exergame training programs to verify the impacts.