Yuichi Kurita, Biological Systems Engineering Lab.
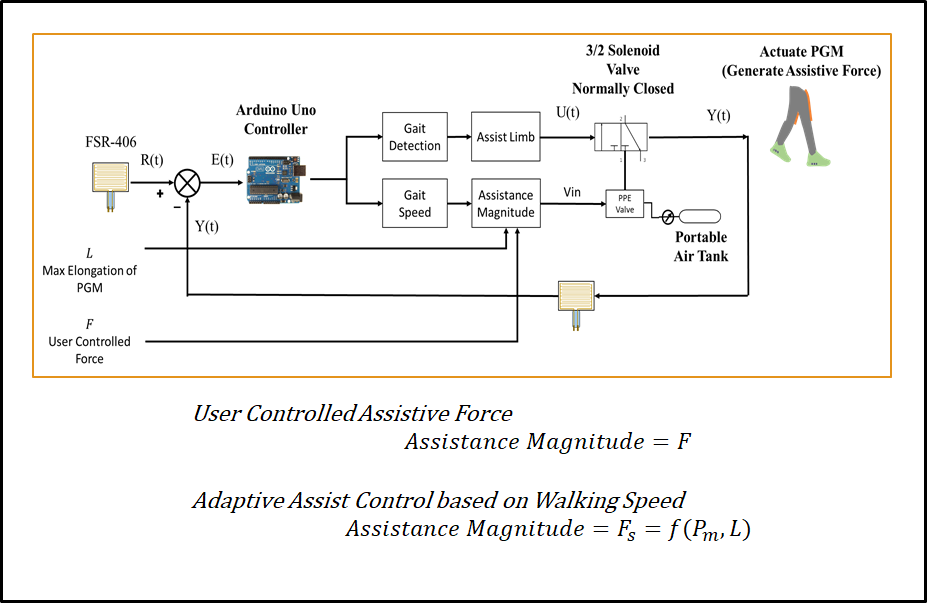
Adaptive Assist Control Based on Impedance Model of Pneumatic Gel Muscle and Its Application in Augmented Walking Suit
(空気圧ゲル人工筋のインピーダンスモデルに基づく適応支援制御と拡張歩行スーツにおけるその応用)
Thakur Chetan Prakash(2020年3月博士後期課程修了)
One’s ability to perform daily routine tasks independently is linked with a healthy lifestyle and a good quality of life. The quality of life affects due to lack of ability to carry out daily tasks. These situations could be injuries, accidents, weak muscles or aging. Technologies such as exoskeletons or exosuits or wearables assistive suits are developed to address such situations. While each one trying to reduce musculoskeletal stress from doing heavy-duty tasks of rigorous activities, they individually add unique value to the result. Exoskeleton aims to restore movements of disabled or amputees or provide a superhuman capability for its users. Exosuit aims to improve wearability of the device by minimizing the metallic structure as observed in the exoskeletons. These devices aim to help in the rehabilitation process, reduce energy expenditure for task addressed explicitly by such devices. Exoskeletons can augment human capability significantly by transferring all the load to ground, but it is challenging to use exoskeletons in an uncontrolled environment, taking on and off is also a challenge. Exosuits, on the other hand, addressed wearability and reduce muscle activation but still use electric actuators, which restrict its use only for the specific task in the controlled environment. The use of such technologies for farmers, elderly support is not wildly discussed. There is a gap in requirement where human augmentation device is needed, which is wearable, and lightweight to reduce muscle effort for desired tasks. In our study, we considered these factors are more critical for human augmentation. We aim to design and developed a wearable assistive suit to reduce human muscle activation using biologically inspired soft actuators, i.e., pneumatic artificial muscles (PAM), to mimic the human muscle activation for walking gait. In our study we proposed using soft actuators to developed compliant and adaptive assist control to develop the lightweight walking augmentation device.