Yuichi Kurita, Biological Systems Engineering Lab.
Superimposition of the Predicted Attachment Positions Based on a Dynamic Model of Hydraulic Excavator Represented by a Second-Order Delay System
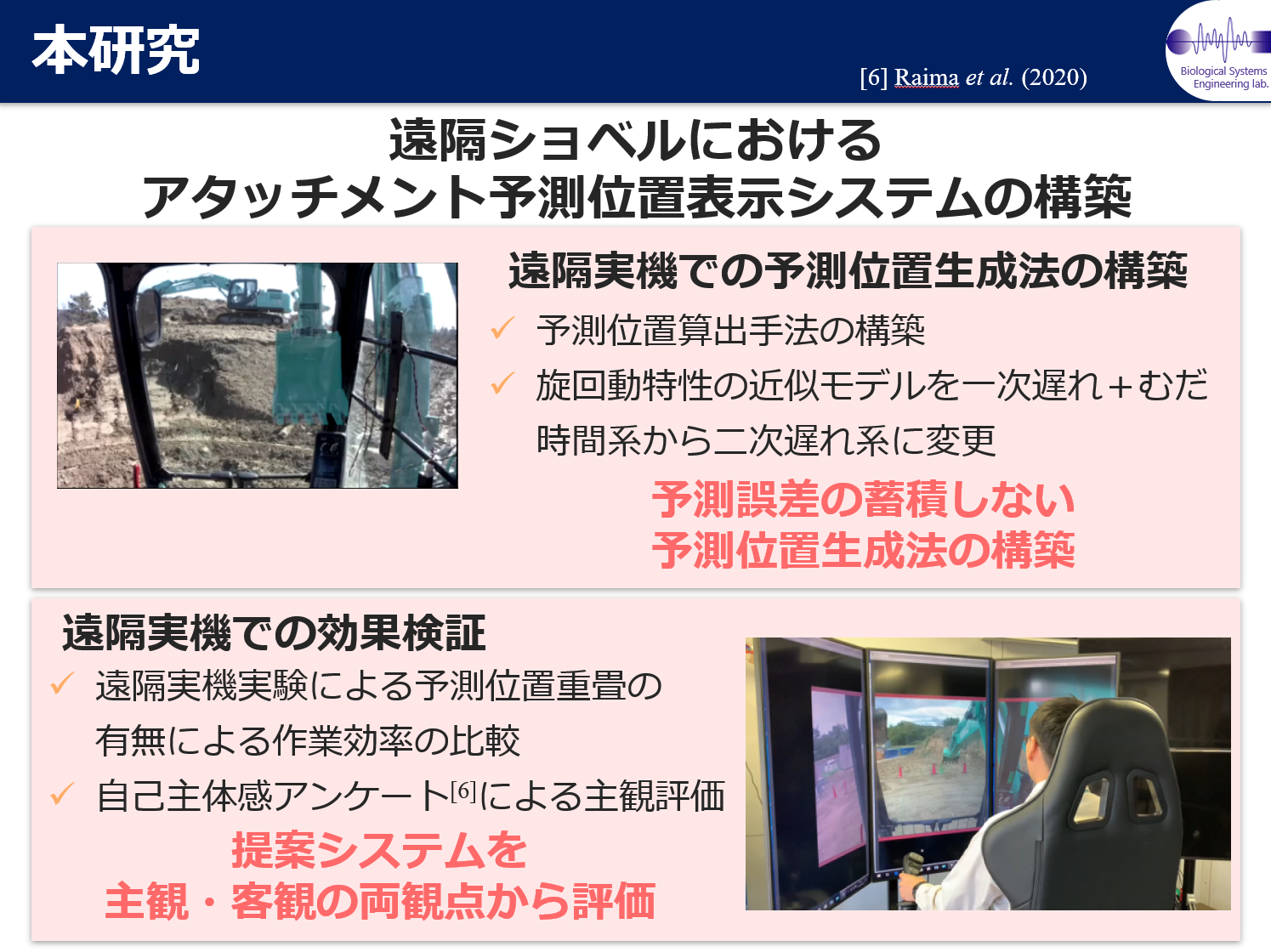
二次遅れ系で表現した油圧ショベル動特性モデルに基づくアタッチメント予測位置の重畳
大川 夢月 (2022年3月博士前期課程修了)
建設機械を遠隔で操作することができれば,建機オペレータが現場へ行かずとも就業可能となり,移動コストの削減による生産性の向上と就業環境の改善が期待できる.そこで遠隔操作油圧ショベルの開発が活発に進められている。これにより遠隔地からの操作が可能となり,施工の効率化が期待できる. 本稿では,遠隔油圧ショベル実機での旋回作業時の予測位置重畳システムの構築とその有効性検証を行う.まず,遠隔油圧ショベルにおける予測位置算出システムを構築する.油圧ショベルの旋回動特性を二次遅れ系とし,操作入力を用いて油圧ショベルの予測旋回角度を算出することを提案する.次に,構築したシステムを用いた被験者試験を実施し,旋回作業時間と自己主体感への影響を検証する.If operators can operate construction machines remotely, construction machine operators can work without going to the site, which is expected to increase productivity by reducing travel costs and improving the working environment. Therefore, remote-controlled hydraulic excavators are being actively developed. These hydraulic excavators are expected to improve the efficiency of construction work by enabling operations from remote locations. In this study, we constructed a system for superimposing the predicted position of a remote hydraulic excavator during swing operation and verify its effectiveness. First, we developed a method for calculating the expected part of a hydraulic excavator. It is proposed that the dynamic swing characteristics of the excavator form a second-order delay system, and that the predicted swing angle of the excavator is calculated using the operation input. Next, a subject test using the developed system was conducted to verify the effects on the swing operation time and sense of agency