Yuichi Kurita, Biological Systems Engineering Lab.
Endpoint Compliance Based on Estimation of Muscle Activity by a Musculoskeletal Model (筋骨格モデルを用いた手先筋活性度コンプライアンス)
櫻田 浩平(2015年3月博士前期課程修了)
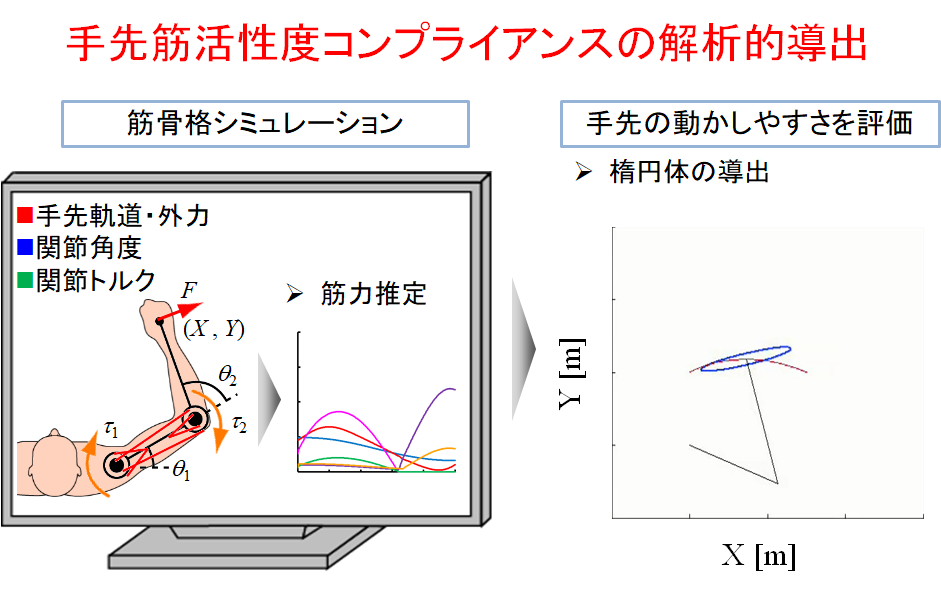
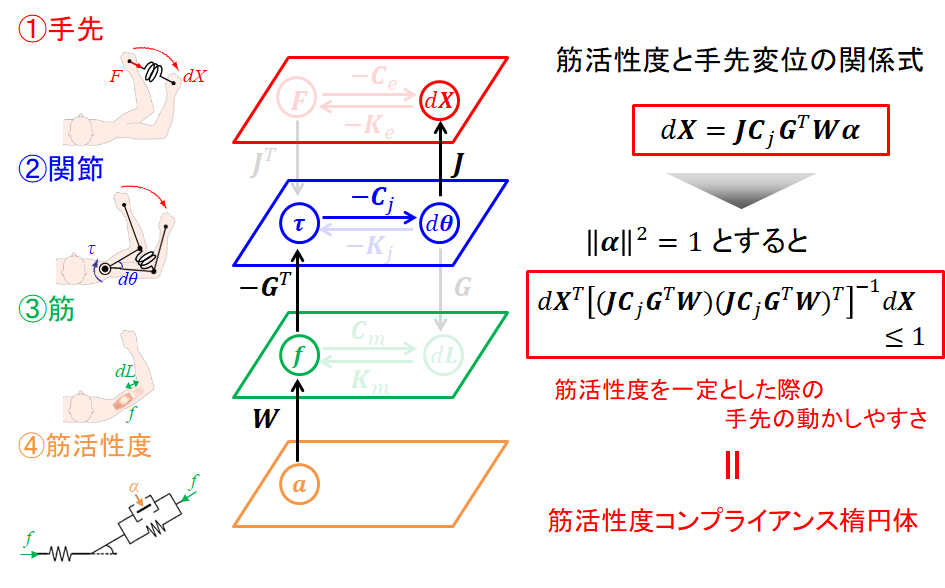
従来,筋力による手先操作性を,運動インピーダンスを反映させた筋力コンプライアンス楕円体で表現する研究などが行われてきたが,手先剛性などを評価するには実際に人間を計測する必要があり,実験装置や被験者実験にコストがかかっていた. そこで本研究では,上肢筋骨格モデルを用いた内力発揮シミュレーションを行ない,手先筋活性度コンプライアンス楕円が算出可能であることを確認した.また,シミュレーション結果を手先振戦計測結果と比較することで手先の動かしやすさを評価できる可能性を示した.