Yuichi Kurita, Biological Systems Engineering Lab.
Haptic rendering by augmenting virtual force on the force response of a base object (補助物体の反力に力覚デバイスの仮想力を重畳する力覚拡張提示に関する研究)
大塚 絋之(2013年3月博士前期課程修了)
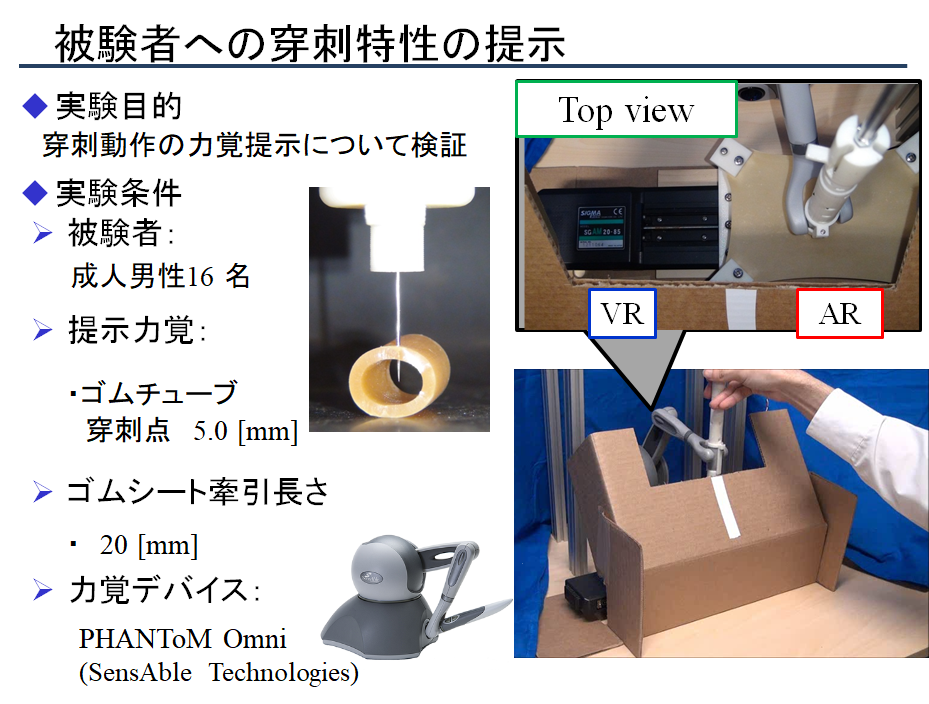
人の臓器など,複雑な粘弾性特性を持つ力覚を高精度でモデル化し再現するのは困難であり,その提示には高性能のデバイスが必要になるため,提示システム全体のコストが高くなりがちである. そこで我々は,反力提示に仮想的に力覚を提示するハプティックデバイスと,実物体の反力を利用する力覚の拡張現実感提提示(Haptic Augumented Reality 以下,ハプティックAR) を提案している. 本研究では,物体を押し込む時の力覚特性および物体に針を刺す動作すなわち穿刺時の力覚特性をモデル化した.またゴムシートと低コストのハプティックデバイスを用いたハプティックARにより,粘弾性物体の力覚を再現できることを実験により確認した.