Yuichi Kurita, Biological Systems Engineering Lab.
Development of an Artificial Muscle Assist Device to Reduce the Mental Load on People
人の精神的負荷を軽減する人工筋アシスト装置の開発
岩本 英憲 (2025年3月博士前期課程修了)
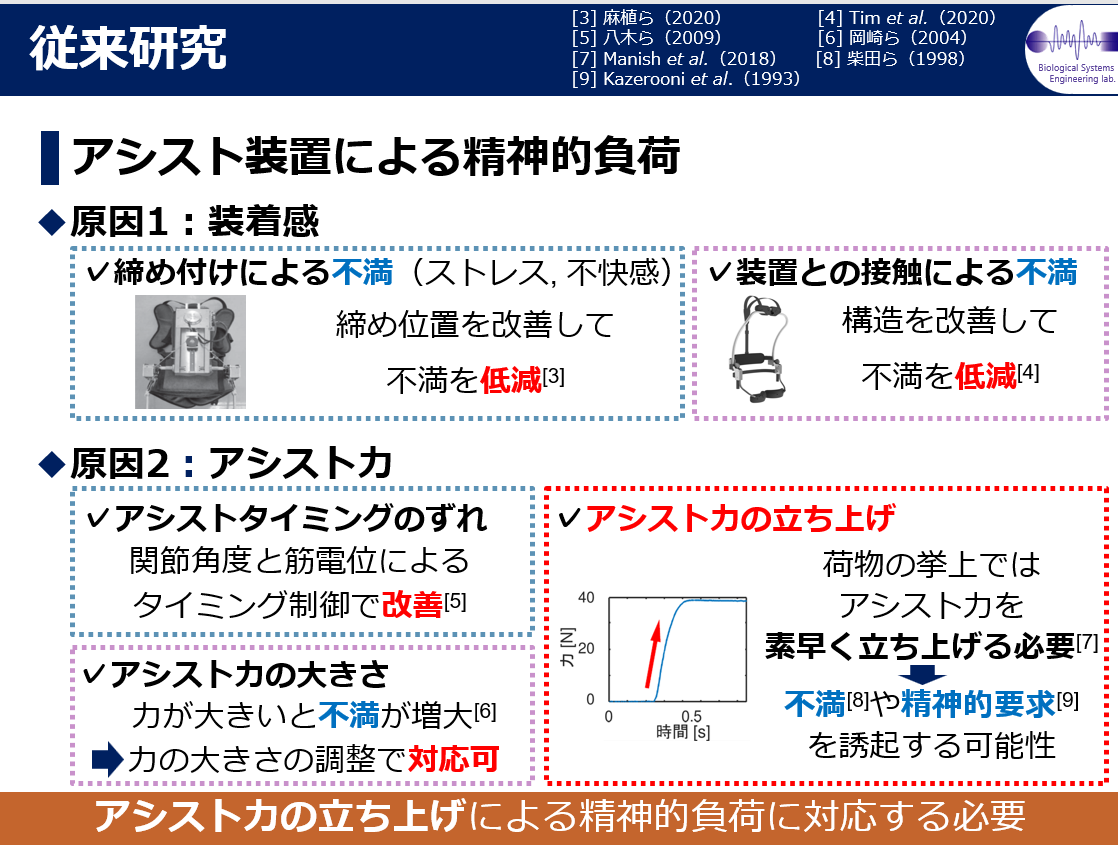
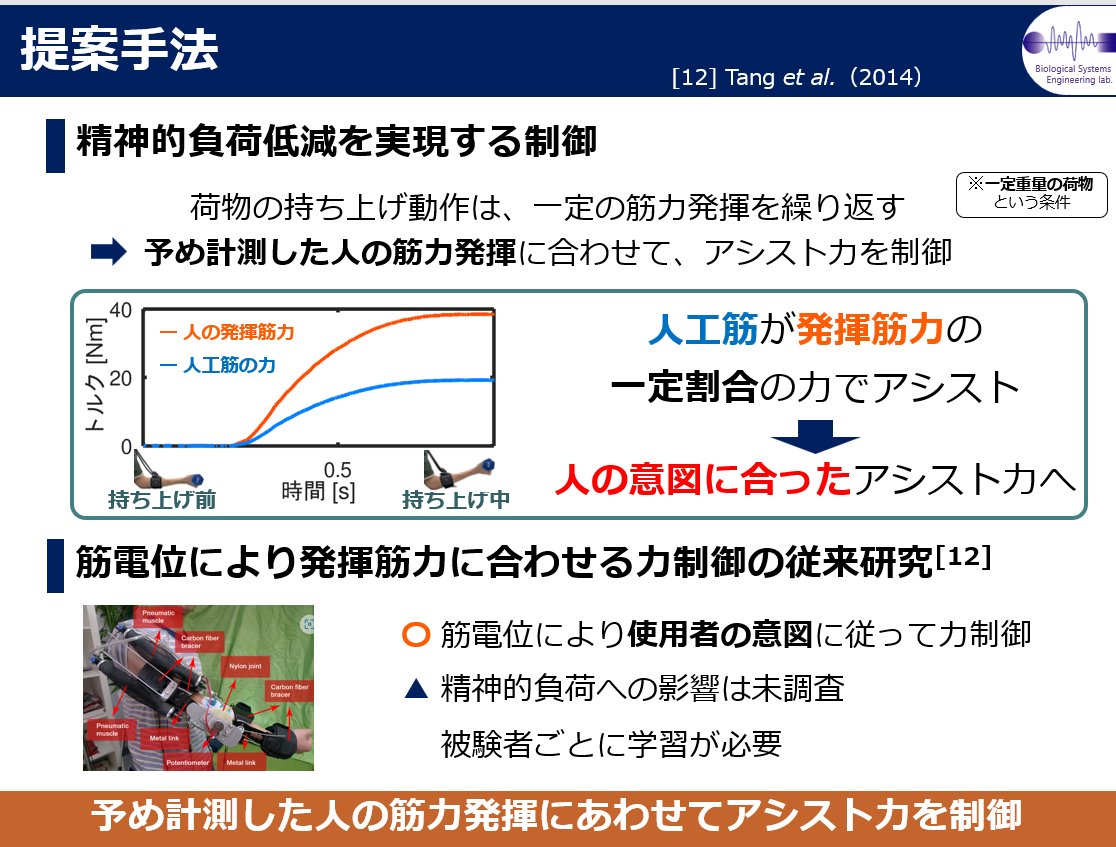
本研究では,アシスト装置自体に力センサを用いず,アシストトルクをフィードフォワード制御する手法を提案する.人は一定重量の荷物の持ち上げ動作では一定の筋力発揮を繰り返すことから,あらかじめ計測した荷物持ち上げ時の人の発揮筋力に従ってアシストトルクを制御することで,アシストトルクを人の筋力発揮に親和したものにし,精神的負荷を低減することを提案する.This research proposes a feed-forward control method for assist torque without using a force sensor on the assist device itself. Since a person repeatedly exerts a certain amount of muscle strength when lifting a certain weight, we propose to control the assist torque according to the muscle strength exerted by the person when lifting a certain weight, which is measured in advance, so that the assist torque becomes friendly to the person’s muscle strength exertion and the mental load is reduced.