Yuichi Kurita, Biological Systems Engineering Lab.
人工筋を用いたON-OFFタイミング制御による歩行アシスト機器の開発
浜田雅人(2019年3月工学部第二類卒業)
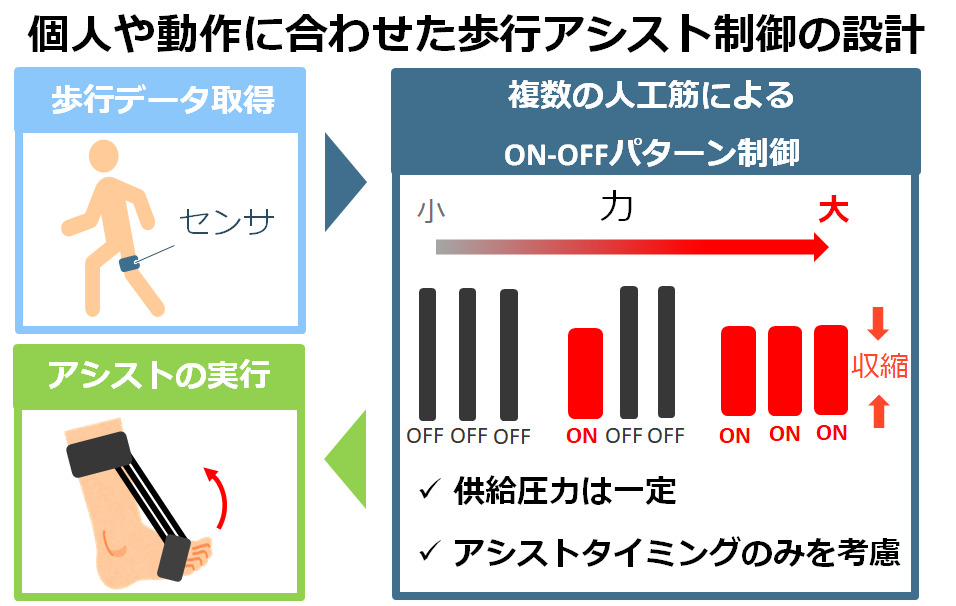
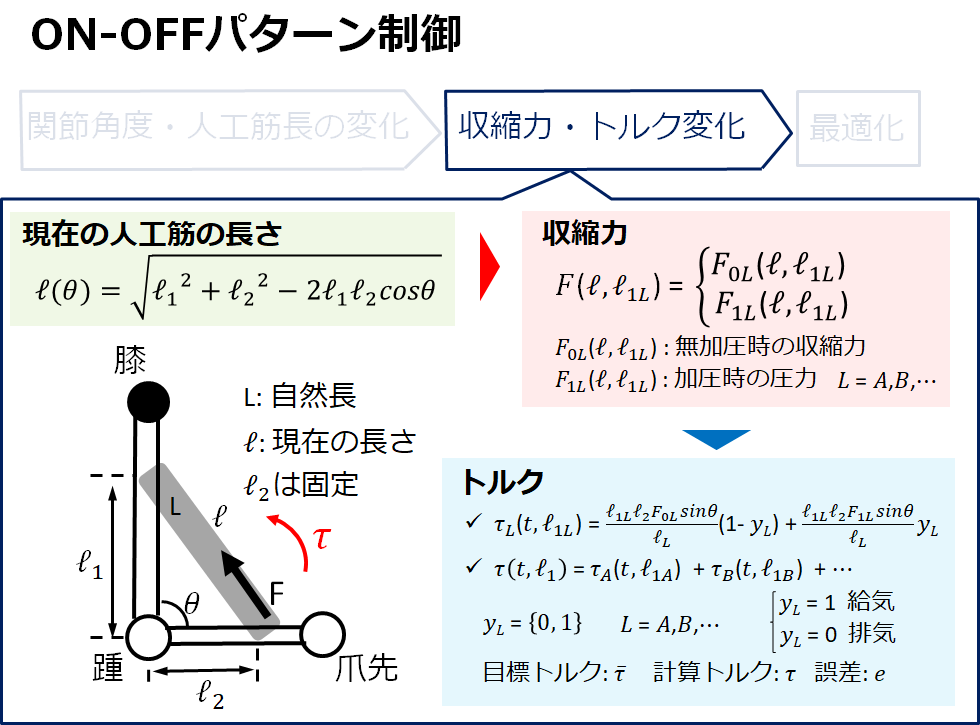
神経障害等により足関節の運動が不自由になり,少しの高低差でもつま先が地面に引っ掛かりつまずきやすくなることがある.これらの症状には,歩行の安定性・安全性を確保することができる足関節の可動域を増大させるアシストデバイスが有効である. 本研究では,軽量かつ柔軟という特性を持ち低圧で大きな発揮力を実現できる,低圧駆動型空気圧ゲル人工筋を使うとともに,歩行中の背屈の支援するために ON-OFF 制御によりアシストタイミングや強度を調整することができる足関節支援デバイスの開発を行った.歩行中の筋電位と足関節角度を測定することで有効性を検証した結果,通常時と比較してアシスト時の足関節角度の増加が確認でき,転倒防止の支援を行えていたことが示唆された.