Yuichi Kurita, Biological Systems Engineering Lab.
人工筋を用いた力覚介入による重り保持時の努力感の操作
小濵 遼平(2022年3月工学部第二類卒業)
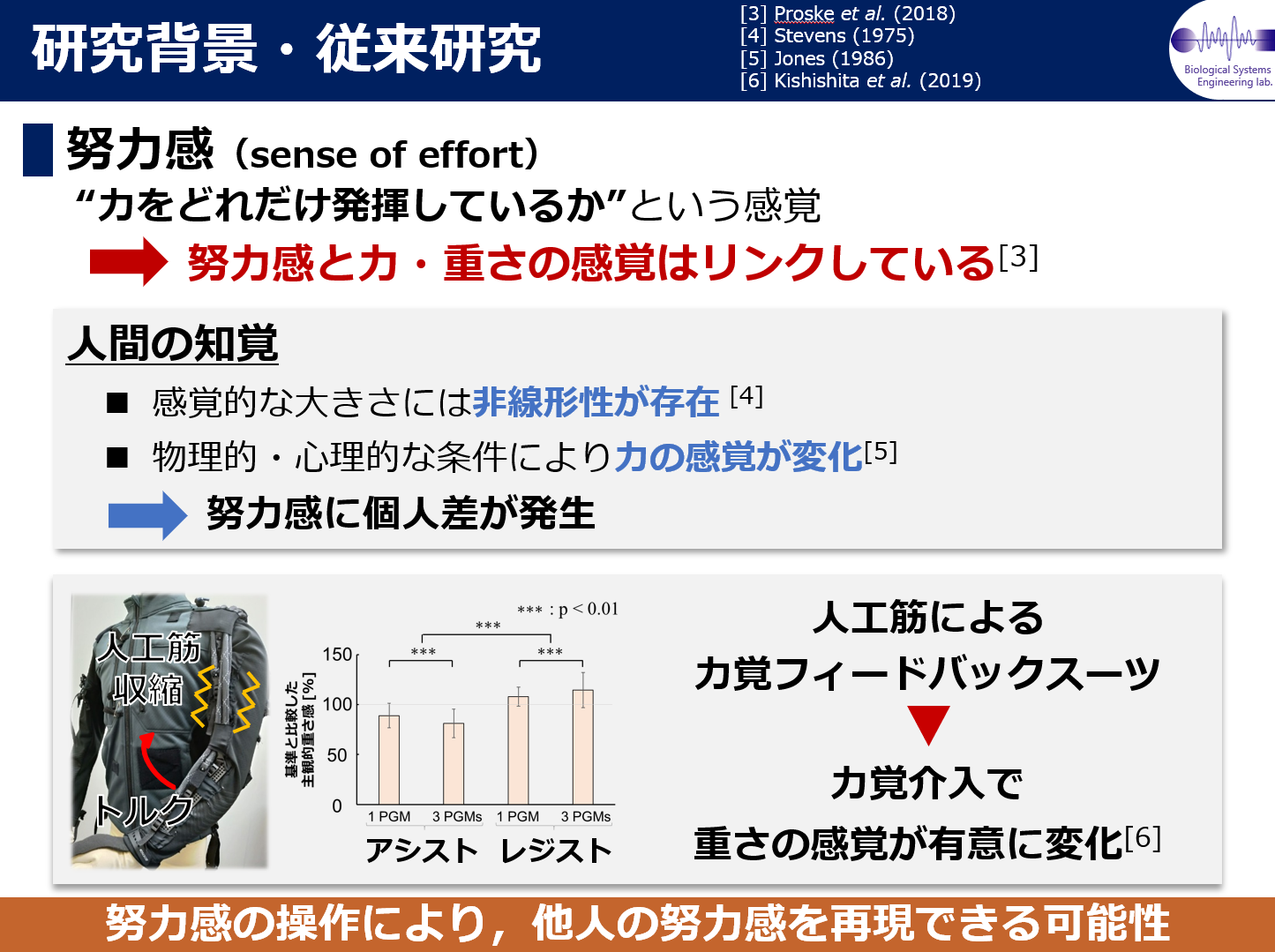
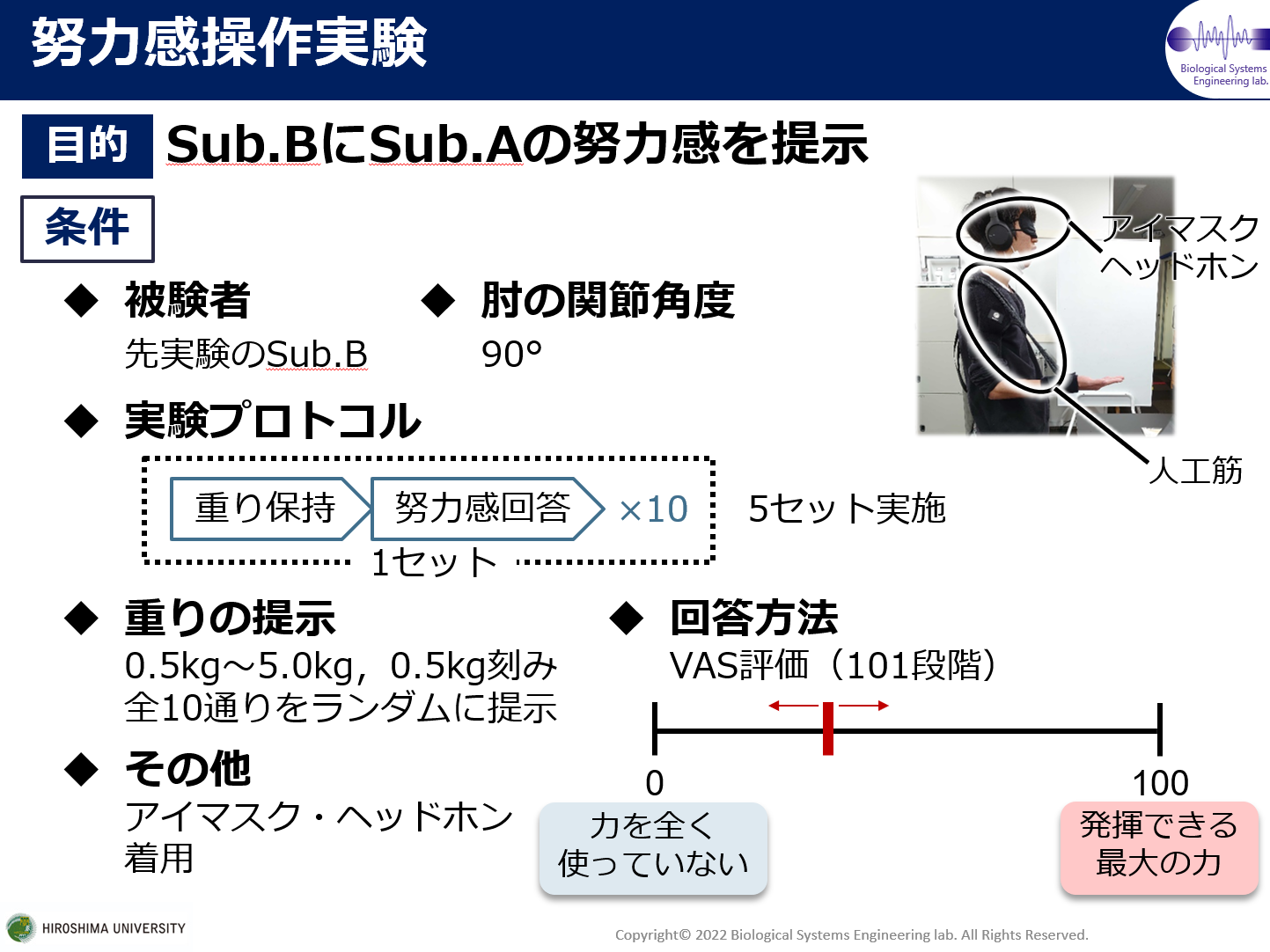
力や重さの感覚について,McCloskey らは,知覚は筋で行われ,その知覚量は脳から末梢に送られる運動指令と筋の伸長などにより末梢から脳に送られる信号のバランスで決定することを報告している.また,Jonesは,物体の物理的な条件や錯覚などの心理的な条件により力の感覚が変化することから,力や重さの知覚量はその物理量とは必ずしも一致しないことを報告している.このととから,力や重さの知覚量には認知的な偏り(知覚バイアス)の存在が示唆される.またKishishita ら力覚フィードバックスーツの開発を行い,空気圧人工筋(Pneumatic gel muscle. 以下,PGM)によるアシストやレジストの結果おもり保持時の重さの感覚が有意に変化したことを報告している.そこで本研究では,PGM を用いた力覚介入で努力感を操作するこ とで,力や重さの感覚を任意に操作することを目的として,肘を90 度に屈曲した状態でおもりを保持する姿勢を対象に,2 人の努力感を一致させることを目的としたシステムを構築した.また,構築したシステムの利用による力覚介入前後での2 人の努力感の差の変化に着目し,検証を行った.