Yuichi Kurita, Biological Systems Engineering Lab.
Proposal of tactile mel scale and
its application to the evaluation system of haptic sensation
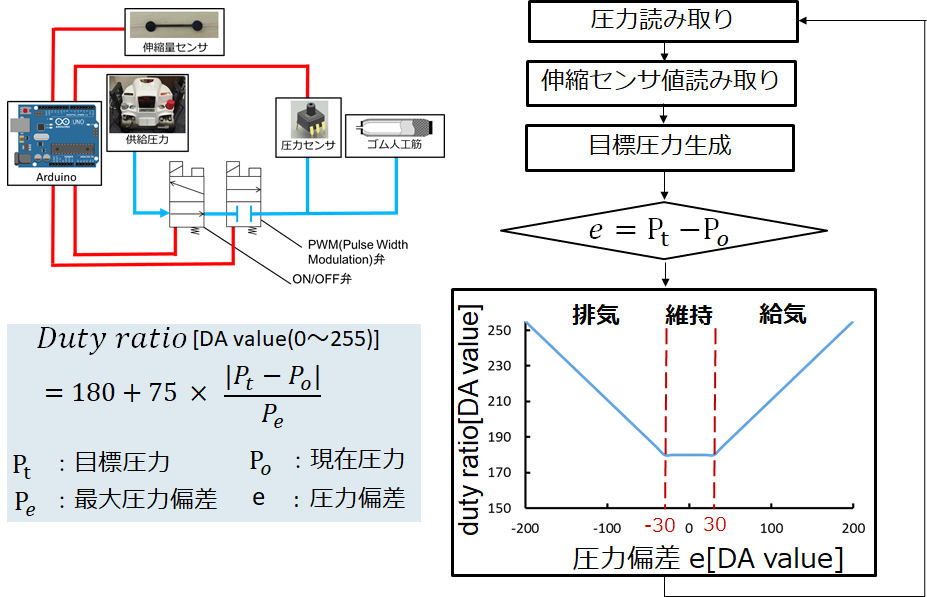
負担感を考慮した空気圧ゴム人工筋肉搭載作業支援スーツの圧力制御
常安孝輔(2019年3月博士前期課程修了)
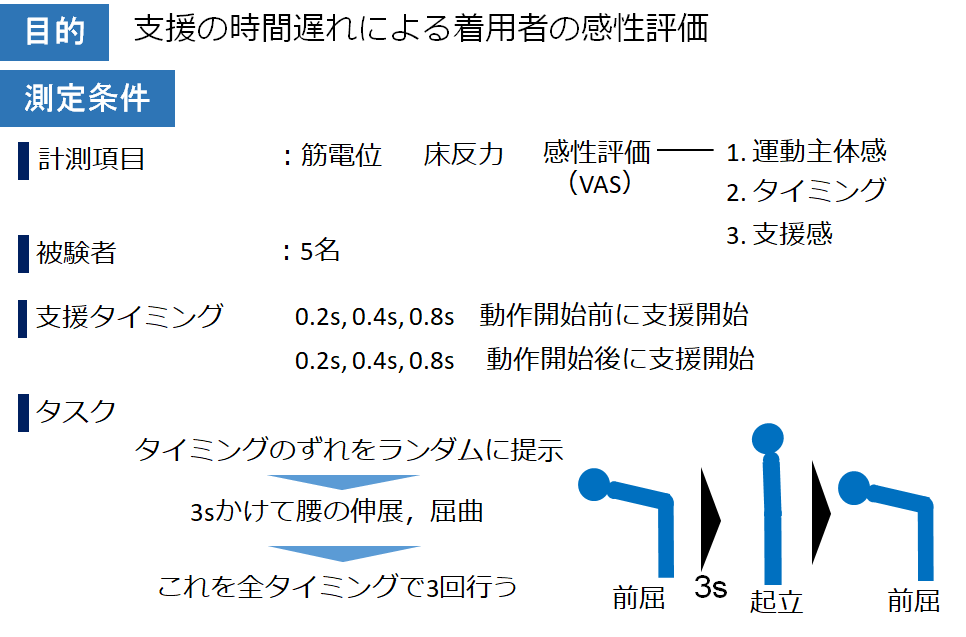
運動アシストスーツにおける支援力が人の動作に対して時間遅れがあると,負担軽減効果だけでなく,支援感などの着用者の主観にも影響を与えるおそれがある.本研究では,作業支援スーツを用い,着用者に支援を与えるタイミングを変化させた際の腰の伸展への支援の時間遅れと主観評価の関係性について調べた.本論文では空気圧ゴム人工筋肉を用いた作業支援スーツにおいて,支援対象である腰の伸展動作のシミュレーションを行い,人の負担を考慮した支援力の制御を行った.その制御を実装し,着用者の筋電位を測定することで,その有用性が確認できた.また,アクチュエータに人工筋を用いているので,避けては通れない時間遅れと着用者の運動主体感,タイミング感,支援感の関係について調べる実験を行った.結果として,今回用いたスーツの支援力程度であれば,支援のタイミングを早めても遅くしても運動主体感にクリティカルな影響は出ないことが分かった.タイミング感や支援感は遅れのない通常の支援よりも,着用者が動く0.2s 前に支援を行った場合に評価が高くなるという結果となった.