Yuichi Kurita, Biological Systems Engineering Lab.
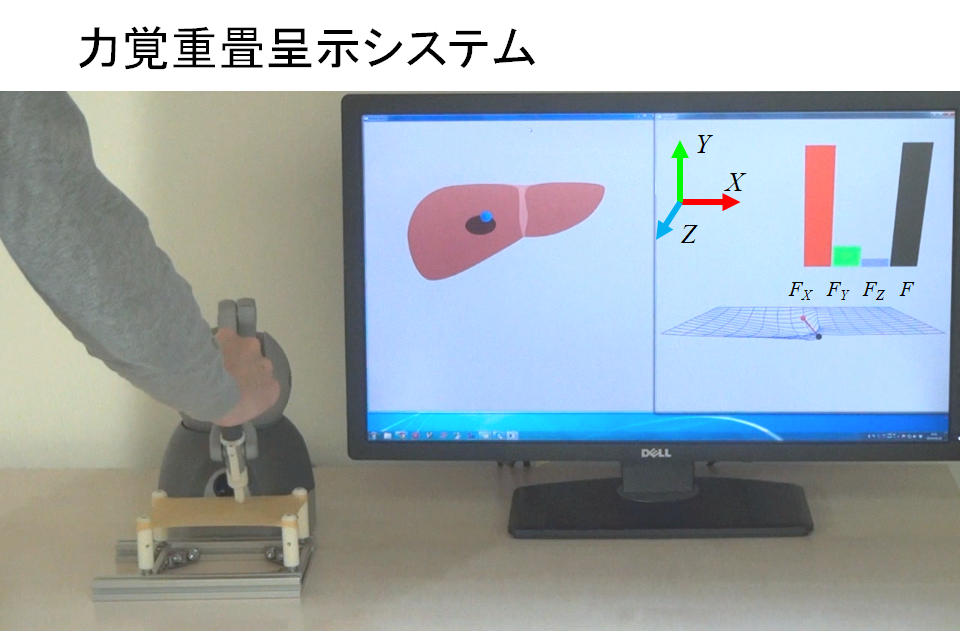
Force Display of a Palpation Motion by Using the Haptic Enhanced Reality Method (力覚重畳技術を利用した柔軟物体のなぞり感呈示)
清岡 雅弘(2014年3月博士前期課程修了)
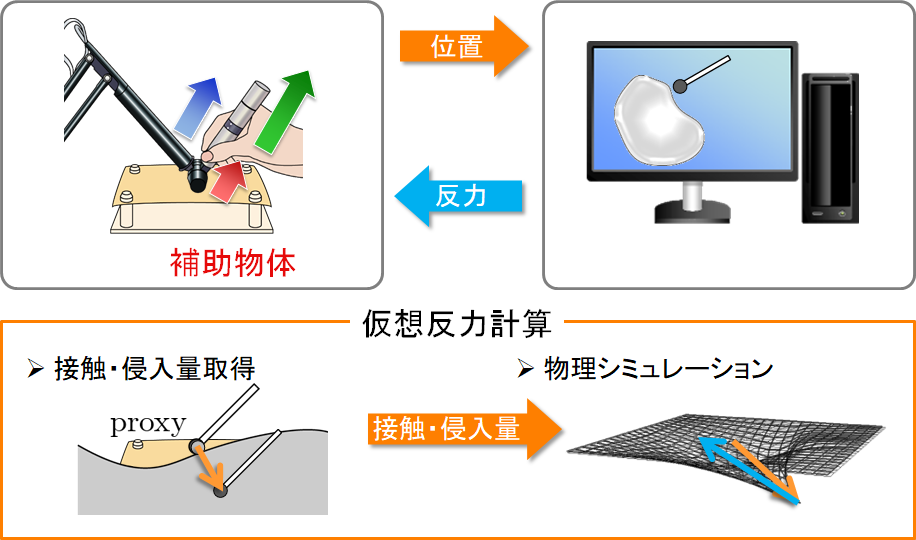
低スペックの力覚提示装置でも比較的再現性の高い反力応答を実現するための手法として,我々は補助物体からの反力に力覚呈示装置からの出力を重畳する力覚重畳呈示(ハプティックAR)を提案している. 従来の力覚重畳呈示手法では物体への単純な押し込み方向に対する反力応答のみを対象としていたが,人が物体に触れる場合,その表面をなぞることで表面の形状,摩擦やテクスチャ感を把握しており, 物体表面に対するなぞり感の提示が必要とされていた. 本研究では,臓器等の柔軟な物体表面をなぞった時の力覚を再現するため,力覚重畳呈示技術を用いることを想定したシステム構築を行い,その効果を検証した.