Yuichi Kurita, Biological Systems Engineering Lab.
Surgical Grasping Forceps with Sensorimotor Enhancement Capability (確率共鳴現象による知覚感度向上を活用した外科手術用把持鉗子の開発)
末田 大和(2014年3月博士前期課程修了)
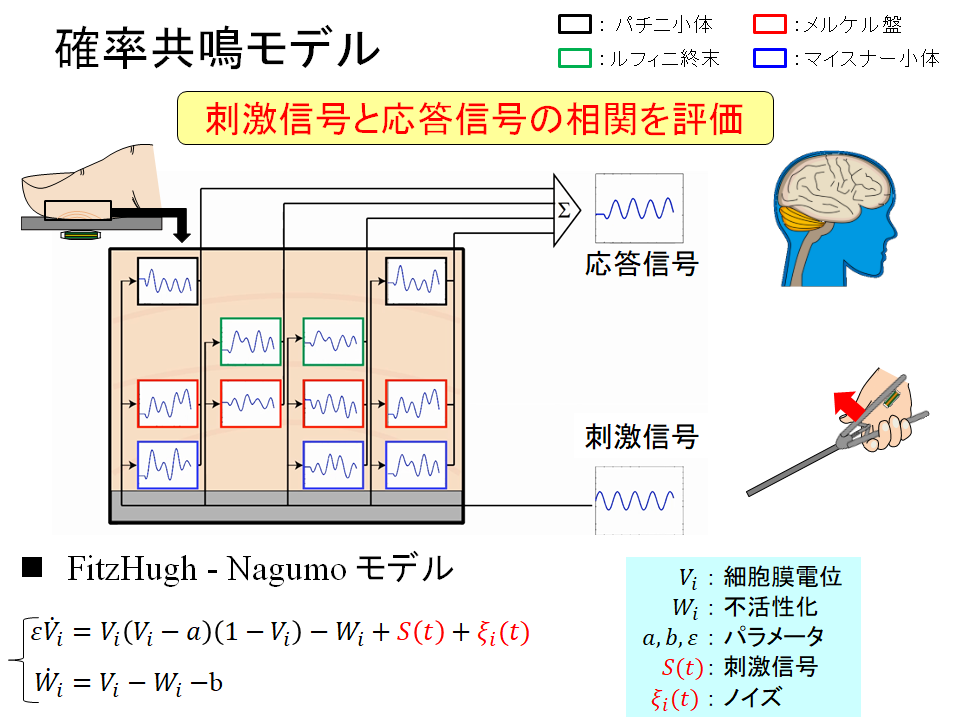
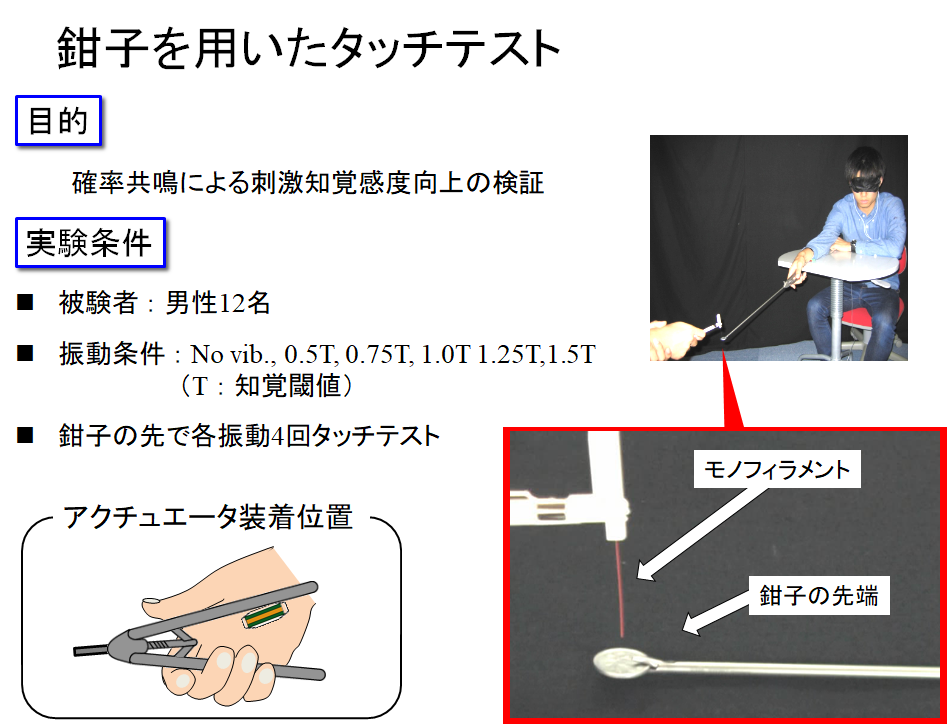
本研究では,振動デバイスを付加することで確率共鳴を生起させ,触知覚感度を向上させる効果を持たせた低侵襲手術用把持鉗子を提案した.確率共鳴を利用して触知覚感度を向上させることができれば,手術時間の短縮,安全性の向上などの効果が期待できる.確率共鳴を利用するためには振動を与える必要があるが,触覚において振動強度が変化した場合の知覚向上効果のメカニズムは必ずしも解明されていない.そこで,触覚受容器を興奮性単位と考え,振動強度が変化した場合の知覚向上効果について加算ネットワークモデルを用いることで考察した.Collins らが提案した興奮性ニューロンの加算ネットワークモデルを用いた解析を応用し,手指における触覚受容器に対する振動強度の影響について調査し,プロトタイプデバイスを用いて触知覚感度向上の検証実験を行なった.