Yuichi Kurita, Biological Systems Engineering Lab.
空気圧人工筋を利用した軽量柔軟な動作支援ウェアの開発
(Development of a Lightweight Flexible Motion Assist Suit Using Pneumatic Artificial Muscles)
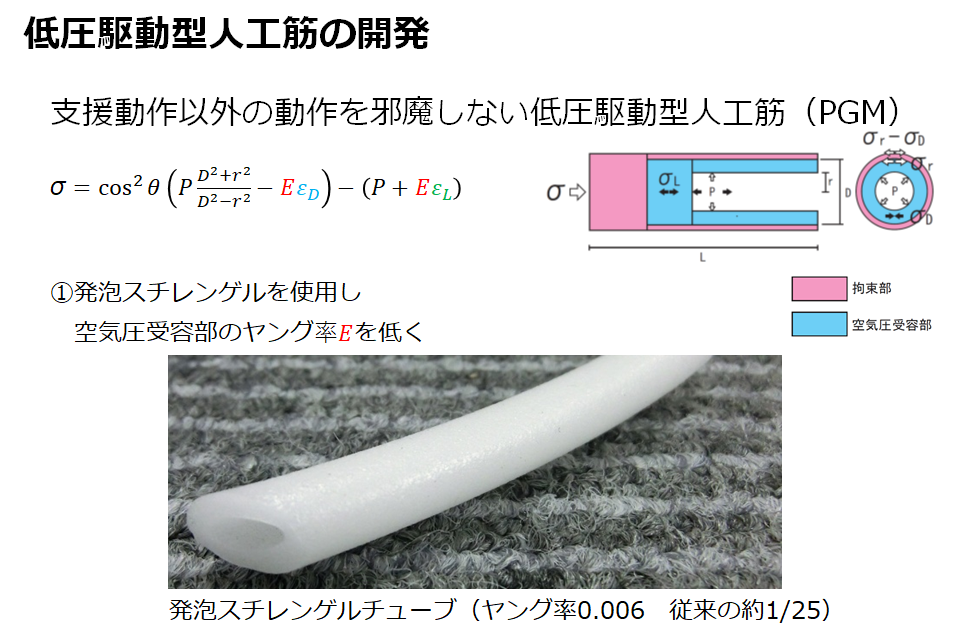
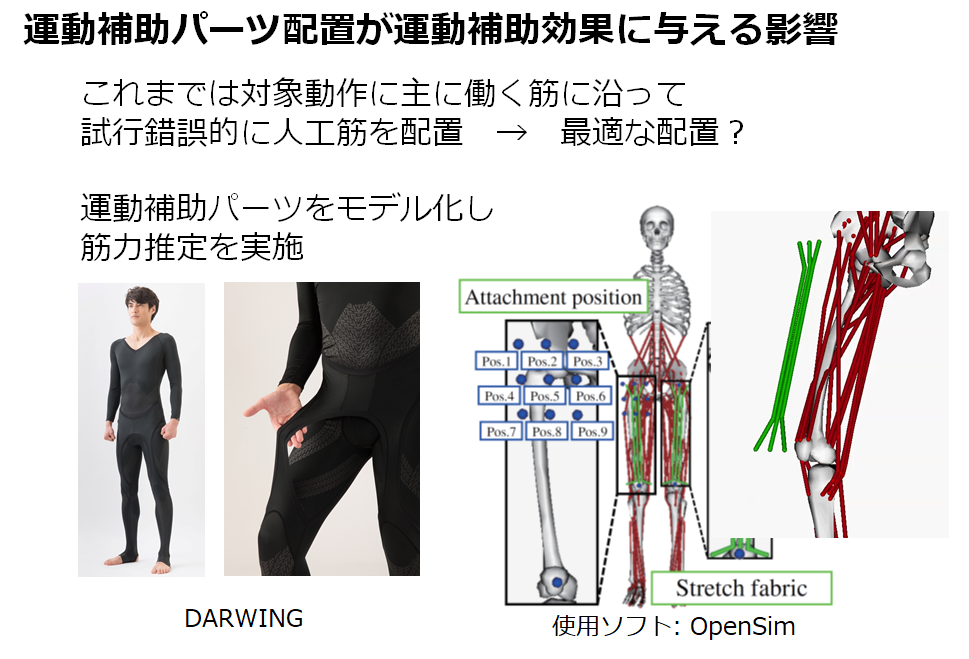
小川 和徳 (2019年3月博士後期課程修了)
運動器自体の疾患や加齢による運動器機能不全により運動器の機能が低下すると,怪我・事故が発生する可能性が大きくなる.その為,運動や外出が億劫になり,さらなる運動器の機能低下を招くという悪循環が発生する.健康寿命の延伸の為には,この悪循環を断ち切る必要がある.その為には,対象者の運動機能を補完し,運動へのモチベーションを上げることが有効である.そこで,運動器の機能が低下した方に無理やり運動をさせるのではなく,進んで運動がしたくなるような,手軽に使用できて楽しい動作支援装置が必要であると考えた.本研究では,低圧で駆動する空気圧人工筋を新たに開発し,これを応用することで,電力の外部供給が不要でありながら装着者の動きに合わせてアクティブに支援を行うことが可能な軽量柔軟な動作支援装置を開発した. 第1章では,本研究の背景と目的について述べた後,従来研究と本研究の位置づけを明らかにする. 第2章では,従来型の空気圧人工筋を利用した建設作業用動作支援装置について述べる.本章では実際に5名被験者で建設作業動作の計測を行い,支援効果について筋電位の%MVCの差で検証する. 第3章では,開発した低圧で駆動が可能な人工筋の構造と機能特性について述べる. 第4章では,低圧駆動型人工筋を利用して開発した無電源歩行支援装置とその効果について述べる.本章では実際に9名の被験者で歩行動作計測を行い,支援効果について筋電位の%MVCの差で検証する. 第5章では,低圧駆動型人工筋を利用して開発した,超人テニス用の無電源動作支援装置とその効果について述べる.本章では8名の被験者でテニススウィングの計測を行い,支援効果について筋電位の%MVCとスウィングスピードの差で検証する. 第6章では,歩行支援用のアンダーウェアを用いて,筋骨格シミュレータにより支援効果の評価と装置の調整設計手法について述べ,アンダーウェアを再現した筋骨格シミュレータの筋力推定を行いその妥当性を筋電位測定にて検証する.