
栗田雄一教授が主指導教員を務めた卒業生・修了生の論文タイトルと概要をこちらで公開しています.
研究紹介

人間の感覚/運動機能の拡張
ヒューマンモデリンググループ歳をとっても日々の生活を楽しむためには,自分の身体を自分で思い通り動かしている感覚や,自分自身でさまざまなものを感じている感覚を保持しつづけることが重要です.道具や情報技術は,人の身体能力の壁や限界を乗り越え,未知の体験をもたらしてくれる可能性を秘めています.これを実現すべく,人の運動や感覚の機能・能力を拡張・向上する人間拡張アシストデバイスの開発を行っています.

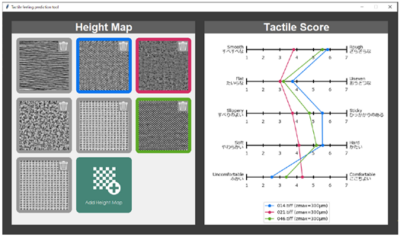
デジタルハプティクス(Digital Haptics):デジタル技術で触感デザインを支援する
ヒューマンモデリンググループ質感を構成する要素の一つである触感は,製品評価にも大きな影響を与えるため,触感の定量的な評価手法が必要です.しかし従来の触感評価技術は,実サンプルを用意してセンサで計測する必要があり,実サンプル製作コストがかかります.そこで我々は,コンピュータ上で触感をあらかじめ予測してテクスチャパターンを作ることを支援できる,Digital Haptics Design(触感デジタルデザイン)ツールを開発しています.
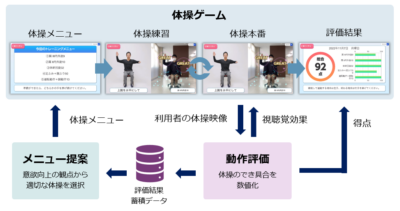
スマートコーチング技術
ヒューマンモデリンググループ工学や情報処理の技術を異分野に応用し,新たな発見や専門家をサポートする機器の開発を目指しています.特に医療,介護、ヘルスケア分野への応用に力を入れており,医療関係者との共同研究を行っています.
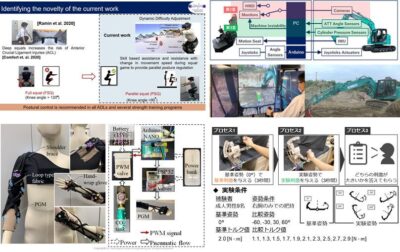
遠隔就労のための次世代インタフェース
ヒューマンモデリンググループ建設機械や建設機械が稼働する現場環境などにおける技術革新を加速させ、持続可能な社会の実現に貢献することを目指して、遠隔で無人建機を操作するための遠隔操作コックピットやインタフェースの研究開発を行っています。

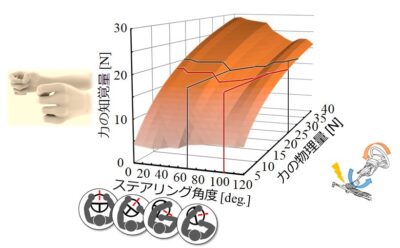
身体モデリングと主観的感覚を考慮したデザイン
ヒューマンモデリンググループコンピュータ技術の進化により,筋・骨格の生理学的・機構的・力学的性質をコンピュータで 再現することが可能になりつつあります. これら身体モデリングの技術を応用して,人の運動や感覚の特性を物理的根拠の明確な指標でとらえて評価し,それを人をより賢くサポートするための補助技術や,より使いやすい製品設計につなげるための手法について研究しています.
経頭蓋磁気刺激(TMS)の自動化に向けたAIロボットシステムの開発
ブレインテックグループ精神疾患や脳卒中後リハビリに用いられるTMSは、高い技術を要する専門家による施行が前提となっています。本研究では、TMS施行の精度と再現性を高めるため、AIとロボティクス技術を活用した自動化システムの開発に取り組んでいます。人間の脳構造に最適な刺激位置をリアルタイムで認識・調整する知能的な操作を可能にし、今後の医療現場や在宅治療への応用を目指します。

ニューロモジュレーションとニューロフィードバックによる脳機能の増強
ブレインテックグループ脳の状態を可視化し、最適な状態に導く技術として、脳波を用いたニューロフィードバックと、電気・磁気刺激によるニューロモジュレーションが注目されています。本研究では、これらの技術を組み合わせ、運動機能や認知機能を非侵襲的に強化する方法を探究しています。教育・医療・産業応用を見据え、科学的根拠に基づいたエンハンスメント技術の確立を目指します。

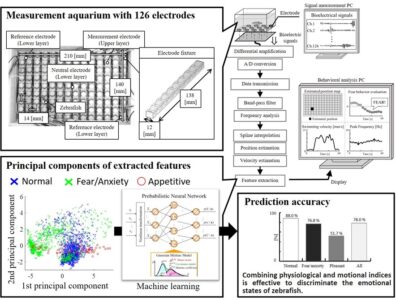
生体電気信号に基づくゼブラフィッシュの情動推定
感性ブレイングループ水槽の底に設置した126個の電極を用いて,ゼブラフィッシュ(Danio rerio)という体長約3 cmの魚の生体電気信号を計測しました.この生体電気信号から呼吸と運動情報を抽出し,ニューラルネットで識別することにより,恐怖/不安状態,快状態という魚の情動を推定することに成功しました.
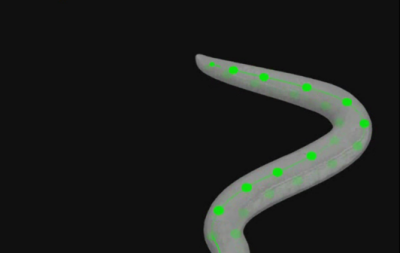
線虫(Caenorhabditis elegans)の 神経回路モデルの構築と化学走性メカニズム解析
感性ブレイングループ本研究では,全神経接続が解明されているCaenorhabditis elegansの神経ネットワークモデルを提案し,実際の神経回路構造を用いた化学走性シミュレーションを行いました.提案モデルは,化学走性の情報処理メカニズム解明を目標とする実生物実験の指針の立案に資することが期待されます.
小型魚類の呼吸波と行動解析に基づいた バイオアッセイシステム
感性ブレイングループ本研究では、小型魚類の呼吸波と呼ばれる生体電気信号に着目し,魚の行動や呼吸信号を同時にモニタリングすることで,水質汚濁を検出するためのバイオアッセイシステムを提案します.

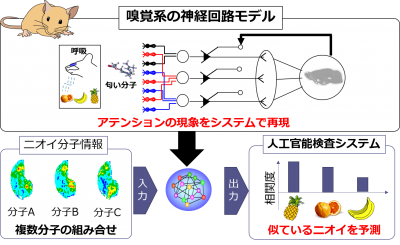
齧歯類嗅覚系の選択的順応メカニズムを再現する嗅球数理モデル
感性ブレイングループ本研究では,嗅覚系の内部状態である神経活動からニオイの感覚を予測するという手法を提案し,嗅覚系構造の一部を模倣したニューラルネットモデルを構築し,感覚予測を目指します.
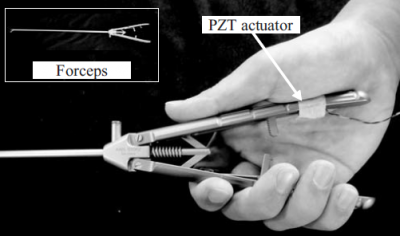
確率共鳴を利用した触知覚感度向上効果を有する低侵襲手術用把持鉗子
ヒューマンモデリンググループ本研究では,ノイズによって知覚可能な閾値を向上させる確率共鳴という現象を用いることで触知覚感度を向上させる効果を持たせた低侵襲手術用把持鉗子を開発しました.
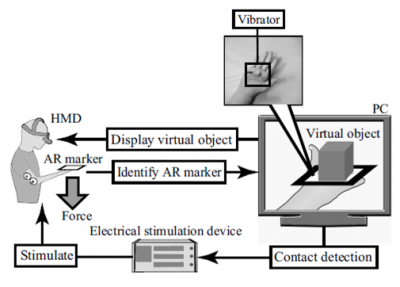
電気刺激を用いた力覚提示
ヒューマンモデリンググループ本研究では,電気刺激の手法の一つである電気的筋肉刺激(Electrical Muscle Stimulation : EMS)を用いて物体の剛性を呈示するシステムの構築を行いました.更に開発したシステムを用いて視覚・触覚情報による剛性の変化に関する検証実験を行った結果,目標の剛性と知覚した剛性の間に正の相関が確認されました
感覚運動機能を向上させる ウェアラブルスーツSEnS
ヒューマンモデリンググループ本研究ではアクチュエータや電機駆動装置を使わない人の感覚運動機能を向上させるウェアラブルスーツSEnS (Sensorimotor Enhancing Suit) を開発しました.この研究の目的はスーツ使用者の上肢における随意筋活動度を減らすことで力の再現能力を向上させることにあります.

過去の研究


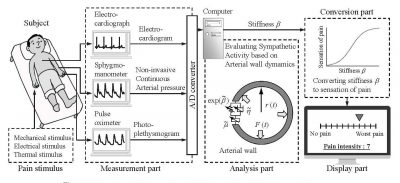
疼痛評価
メディカルエンジニアリンググループ交感神経活動に支配される血管力学特性の変化と疼痛を伴う皮膚電気刺激およびヒトが感じる主観的な疼痛強度の関係性を解析しています.そして,末梢血管剛性,皮膚電気刺激および主観的疼痛評価の間に一定の関係が成立することを実験により明らかにしました.
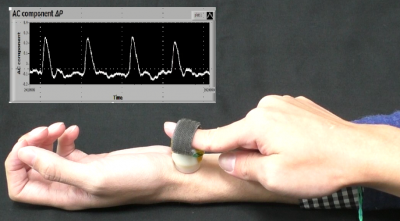
電磁誘導血圧計
メディカルエンジニアリンググループ頸動脈の連続血圧波形を計測可能で,同時に計測者がセンサを介して被験者の脈波を触診可能な新しい血圧計を開発しています.具体的には,(1)高いSN比で連続血圧を計測可能であること,(2)計測者がセンサを介して脈波を触診可能であること,(3)小型で脱着が容易であることという特徴を備えた電磁誘導型非侵襲連続血圧計を提案しています.
血管内皮機能評価
メディカルエンジニアリンググループオシロメトリック法を応用した血管内皮機能評価手法ezFMD (enclosed zone flow-mediated vasodilation) を提案しその力学的計測原理を解明するとともに,血管粘弾性特性を考慮した新しい血管内皮機能評価指標を提案しています.

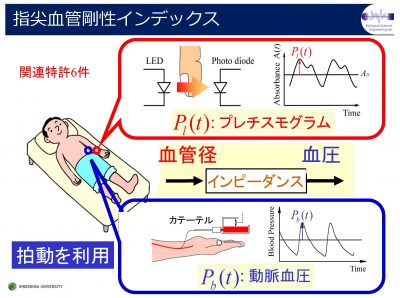
血管粘弾性モデル
メディカルエンジニアリンググループ末梢血管系の血圧と血管径の非線形特性を考慮した非線形血管力学モデルを導出することにより,血管力学特性を評価するための新しい対数線形化末梢血管粘弾性インデックスを提案しました.
末梢血管剛性は痛み関連領野の脳活動と主観疼痛強度に正相関する
メディカルエンジニアリンググループ疼痛刺激をヒトに提示したときの脳活動,末梢交感神経活動指標である末梢血管剛性,Visual Analogue Scale(VAS)による主観評価を計測し,これらの間の関係について解析しました.その結果,脳の疼痛関連領野の一部が末梢血管剛性と有意に相関する活動を示すことが明らかになりました.

