サイバネティクスを超えて (2)
<前回から続く>
■未知の環境を探索するバクテリア模倣型移動ロボット[2]
はじめて経験する環境で特定の刺激を手掛かりとしてその信号源を探索するロボットには、多くの困難がつきまといます。
環境には手掛かりである刺激を乱す多くのノイズが存在しますし、環境から働く予測不可能な力によって正確な現在位置さえ計測することは困難です。
そこで、私たちは体長わずか2〜4μmいう小さな身体でこの難題を解決しているバクテリアに注目しました。
まず、大腸菌E. coliの走化性トランスデューサー型蛋白質と細胞内蛋白質によるシグナル伝達経路を化学反応式で表現し、刺激入力から鞭毛モータ出力までの一連の過程をモデル化しました。
次に、このモデルをコンピュータに組み込み、人工センサでキャッチした刺激信号を入力として移動ロボットの前進と方向転換を切り換えるバクテリア模倣型制御アルゴリズムを構築しました。
大腸菌の走化性アルゴリズムを搭載したバクテリア型移動ロボットは、そのサイズの違いから当初はうまく動作できなかったものの、アルゴリズムに含まれる反応速度パラメータなどを進化的に調節することにより、生物とほぼ同様の探索行動を再現することができました(図2)。
私たちの研究班では、他にもゾウリムシ型や線虫型の移動ロボットの開発を進めており、それらの行動アルゴリズムの違いに興味を持っています。
■ロボット技術は生物研究に役立つか?
生物の走化性アルゴリズムをロボットに搭載することにより、生物モデルが人工物を制御する能力を秘めていることを証明することができました。
私たちの研究班では、研究の次のステップとして、「ロボット技術を利用して生物の運動に伴う内部状態の変化をキャッチできるか」という取り組みに着手しています[3]。
対象としている生物は線虫です。
私たちは線虫の身体をロボットとみたて、線虫の運動を記録したビデオ画像から、その運動を実現するために必要とされる筋や運動ニューロンの活動を計算できないかと考え、現在、研究に取り組んでいます。
光学計測による生物実験とロボット技術を駆使したモデル解析のコラボレーションによって、生物学と工学を結び付ける新たな新学術研究が展開できればと考えています。
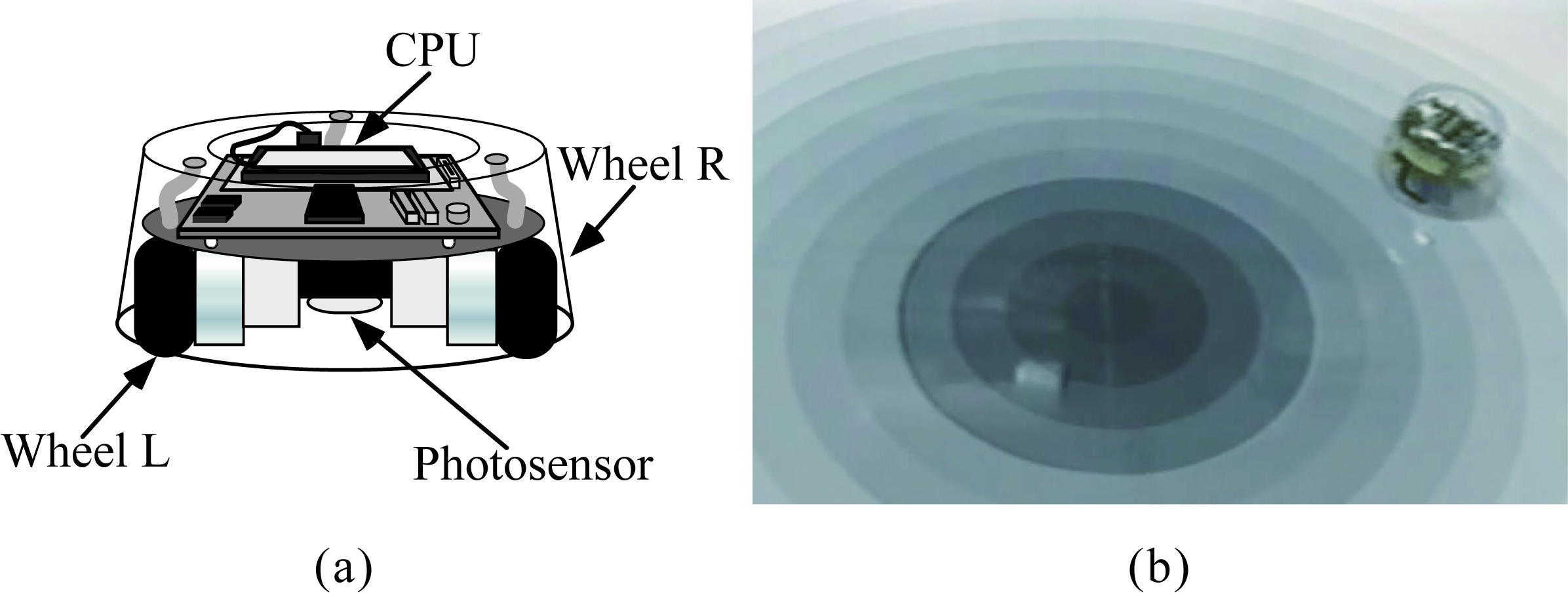
図2 バクテリア模倣型移動ロボット
(a) 開発した移動ロボット。底部に設置したフォトセンサにより床面の明るさを計測し、上部に搭載したCPUで左右両輪を独立に制御します。
(b) 実験に用いた仮想環境。床に描いた濃淡模様を化学物質の濃度勾配にみたてることにより、誘引物質への集積行動と忌避物質からの逃避行動を仮想的に再現しました。
[2] Toshio Tsuji, Michiyo Suzuki, Noboru Takiguchi, Hisao Ohtake: Biomimetic Control Based on a Model of Chemotaxis in Escherichia coli, Artificial Life, Vol. 16, No. 2, pp.155-177, Spring 2010.
[3] 曽 智, 山田 泰隆, 正岡 和弥, 服部 佑哉,鈴木 芳代,辻 敏夫,大竹 久 夫: 線虫 C. elegans の動力学モデリングとシミュレーション, 第55回システム制御情報学会研究発表講演会論文集, T0411, 2011.
2011/06/28
|