
本研究では振動子を取り付けることによって,確率共鳴の効果で触知覚感度を向上させた低侵襲手術用把持鉗子のコンセプトを提案した.まず,適切な振動を適用するために,FitzHugh-Nagumoニューロンの加算ネットワークを構築し,各4つの触覚受容器にホワイトノイズを適用した時の応答を検証を行なった.シミュレーションの結果,SR効果によって異なる特性を持つ複数の受容器の能力が拡張されることを明らかにした.このシミュレーションの結果に基づき,SR効果の利点を活かした手術用把持鉗子を開発を行なった.更にこの鉗子によっ触知覚能力が向上しているかを検証するために,タッチテスト,質感識別テスト,腫瘍検出テストを行なったところ,ノイズ強度が最適な範囲で維持されることで触知覚能力が向上し,SR効果が手術用機器に有用であることを確認した.
研究紹介

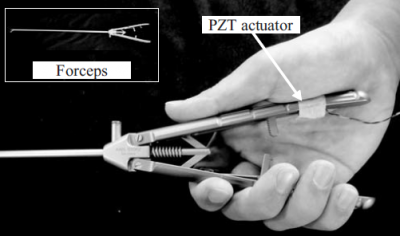
確率共鳴を利用した触知覚感度向上効果を有する低侵襲手術用把持鉗子
関連文献情報
Surgical Grasping Forceps with Enhanced Sensorimotor Capability via the Stochastic Resonance Effect, Yuichi Kurita, Yamato Sueda, Takaaki Ishikawa, Minoru Hattori, Hiroyuki Sawada, Hiroyuki Egi, Hideki Ohdan, Jun Ueda, and Toshio Tsuji, IEEE/ASME Transactions on Mechatronics, Volume: 21, Issue: 6, pp. 2624 – 2634
