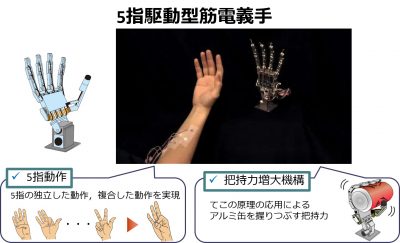
本研究では,把持力増大機構を有し,5指の独立した屈曲動作が可能な筋電義手を提案する.生体の動作を同様の自然な制御を実現するため,制御システムには人の前腕のインピーダンスモデルを内蔵し,使用者の筋電信号から求めた筋収縮度を制御信号として用いた.実験の結果,本5指義手の握力は20Nを超え.屈曲駆動による握り動作を0.53秒で実現できることを確認した.また,制御信号として筋電位信号を用いることで,指の滑らかな動きと把持力の調整が可能であることを確認した.
研究紹介

把持力増大機構を用いた5指駆動型筋電義手の開発
関連文献情報
1. Electromyographic prosthetic hand using grasping-force-magnification mechanism with five independently driven fingers, T. Takaki, K. Shima, N. Mukaidani, T. Tsuji, A. Otsuka and T. Chin
Advanced Robotics, Volume 29, Issue 24, pp. 1586-1598,
2. 5指駆動型筋電義手と筋シナジーモデルに基づく新しい制御法, 辻 敏夫,芝軒 太郎,島 圭介,高木 健,大塚 彰,陳 隆明, 日本義肢装具学会誌,26巻, 2号, pp. 91-96, 2010.
3. Multivariate Pattern Classification based on Local Discriminant Component Analysis, Nan Bu, and Toshio Tsuji, Proceedings of IEEE International Conference on Robotics and Biomimetics 2004, 290, Shenyang, China, August 2004.
4. 木構造を有する階層型確率ニューラルネットの提案と指形状識別への応用, 岡本 勝,村上 樹里,柴 建次,辻 敏夫, 計測自動制御学会論文集,Vol. 43, No. 2, pp. 128-134, 2007.
