Yuichi Kurita, Biological Systems Engineering Lab.
力覚の重畳技術を利用したハプティックデバイス
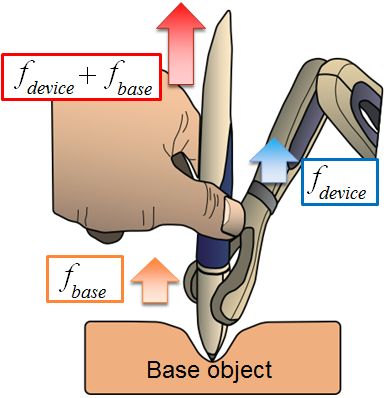
研究背景コンピュータから人へ直感的に情報を伝える手法として力覚呈示に関する研究が数多くされています. ここで物体内部の粘弾性や表面の摩擦,粘着性などを含む複雑な力覚呈示を行うためには,高精度なモデル化と実時間内で処理可能な高性能なハードウェアが必須となっています. 我々は,低スペックの力覚提示装置でも比較的再現性の高い反力応答を実現するための手法として,力覚拡張呈示を提案しています. キーとなる考え方は,再現したい目標物体に似た物体特性をもつ補助物体を用意し,これに力覚デバイスが生成した力を重畳することにあります. これにより,(1) モデル化しきれない,または力覚デバイス単体では再現しきれない反力応答を,補助物体がカバーすることで力覚の再現精度を高めることができる,(2) 補助物体が持つ反力特性に対してデバイスが力を重畳することで,仮想的に硬く/柔らかくするなどの反力の操作が可能になる,といった利点が得られます.
研究内容概要
力覚重畳呈示は,基本的に補助として配置された物体の反力応答とハプティックデバイスが出す力を合わせることで目標反力を呈示しようとする手法です.
したがって,目標物体と補助物体の特性を捉え,それを元に力覚デバイスが出力する力をどう決定すべきかが制御におけるポイントになります
しかし先に述べたように,複雑な対象物の反力応答を完全にモデル化することは非常に難しく,またモデル化できたとしても安価なデバイスはそれを十分に実現できません.
このような条件においては,デバイス出力を決定する反力モデルは極力シンプルに抑えながら,補助物体が元々持つ特性をうまく利用することで目標反力応答を実現する,というアプローチが効果的です.
我々は医療シミュレータへの応用を見据えて,これまでに押し込み運動や針による穿刺時の反力を,ゴムシートに廉価なデバイスによる仮想力を重畳する手法を提案し,その有効性を確認しています.

代表的な特許・論文
- 力覚提示システム, 栗田雄一,辻敏夫,大塚紘之,清岡雅弘,惠木浩之,大段秀樹,永田和之, 特願2012-262762 Filed on 2012.11.30
- Yuichi Kurita, Atsutoshi Ikeda, Kazuyuki Nagata and Tsukasa Ogasawara, Haptic Augmented Reality Utilizing the Reaction Force of a Base Object, Journal of Robotics and Mechatronics, Vol.25, No.1, pp.72-79, 2013
- 栗田雄一,大塚絋之, 永田和之,辻敏夫, 補助物体の反力に力覚デバイスの仮想力を重畳する力覚拡張呈示に関する研究 −ゴムシートを利用した穿刺力覚の呈示−, 電子情報通信学会技術報告, HIP2012-74, pp.7-12, 2013.3.13-14