Yuichi Kurita, Biological Systems Engineering Lab.
Medical applications of haptic modeling
1. Background Haptic information is crucial in the execution of precise and dexterous manipulations. During minimally invasive surgery, medical doctors are required to indirectly sense force-related information from body organ tissue via forceps because they cannot directly touch the tissue. The evaluation of force-based skill is critical in the judgment of whether a person has adequate manipulation skills to conduct surgery procedures. Currently, simulation training in minimally invasive surgery is a required component of general surgery residency training. A primary obstacle in the development of a training simulator with a haptic feedback capability is its high cost.2. Research Summary The first study aims to explore the challenge of skill evaluation in a laparoscopic surgery by measuring the force applied to forceps, whereas the second study describes a novel haptic display based on a haptic augmentation technique. These studies employ a cost-effective force measurement to evaluate the skills in surgical operations and a cost-effective haptic display to provide a surgical simulator with a haptic feedback capability.
3. Result
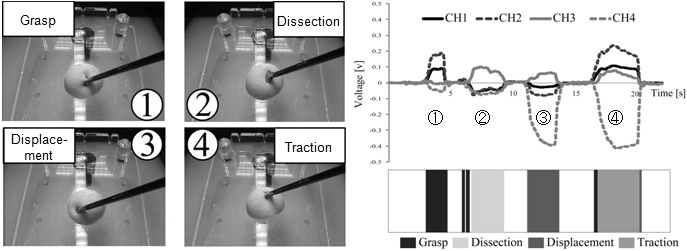
- Basic manipulations were defined by observing the laparoscopic surgery videos of a cholecystectomy operation. These observations revealed that the following four manual operations account for 80% of the total contact time between the forceps and body tissue. The basic manipulations are classified by monitoring the voltage of strain gauge attached at the grip of the forceps. By monitoring the voltage change of each strain gauge, which corresponds with the force applied, the manipulation log is automatically obtained based on the predetermined threshold. The proposed automatic classification method was used to evaluate skills in forceps manipulation training.
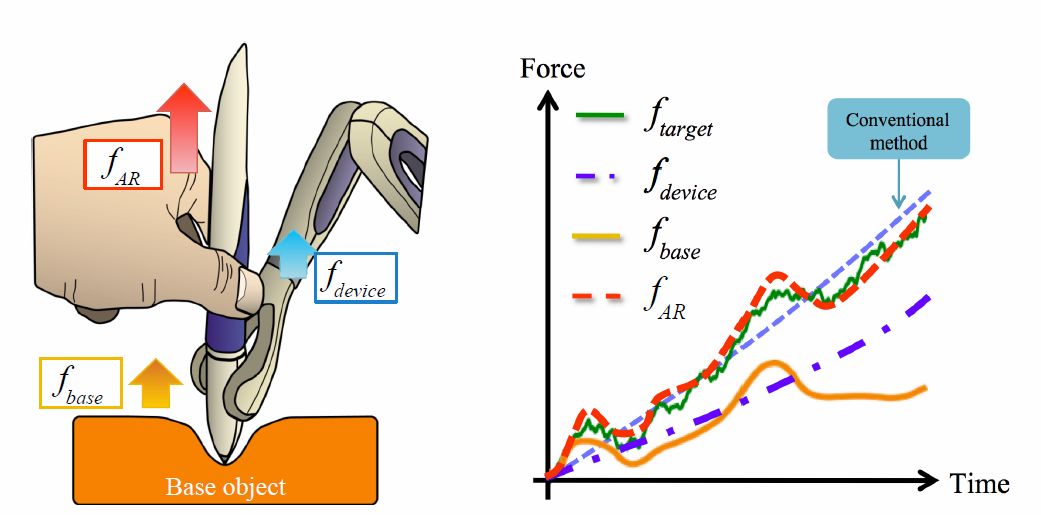
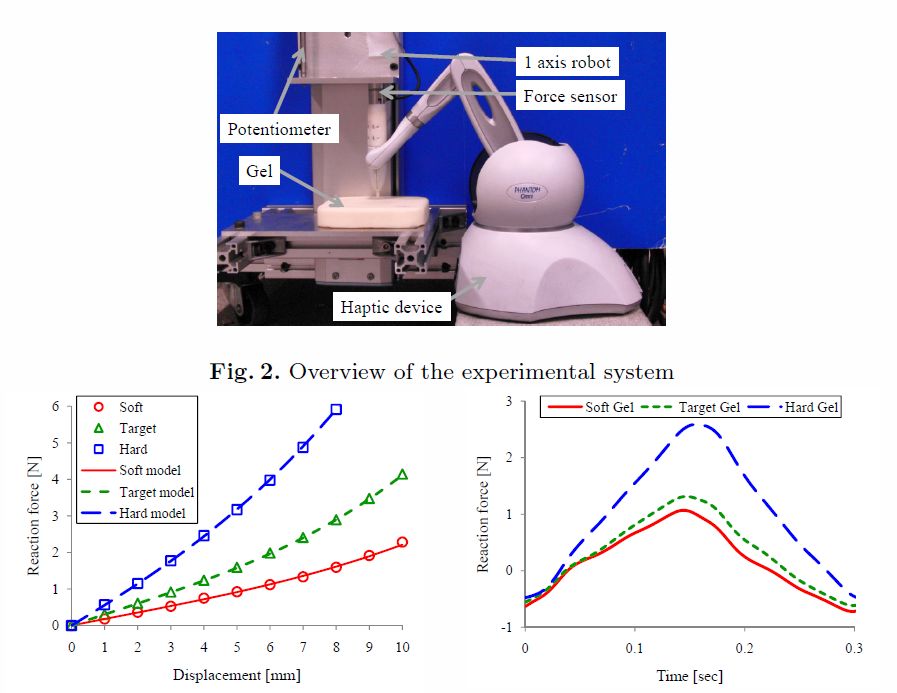
- The haptic AR interface has the potential to easily generate the non-linear force response of a viscoelastic object by using a base object that has similar properties to the target object. Experimental results suggest that the selection of an appropriate base object, which has good characteristics to compensate the force model, is essential to make the haptic AR method work effectively in haptic display. Subjective evaluation tests showed the usefulness of the proposed method. Promising applications of the haptic AR technique include the manipulation of objects that have a complex force response and are not easy to be modeled with simple mathematical expressions. A training simulator for medical doctors that displays the haptic feedback of body organs and biological tissues is a primary example of potential applications for the haptic AR technique.
- Yuichi Kurita, Atsutoshi Ikeda, Takeshi Tamaki, Kazuyuki Nagata, and Tsukasa Ogasawara, "Haptic Augmented Reality Interface using the Real Force Response of an Object," The 16th ACM Symposium on Virtual Reality Software and Technology (VRST 2009), pp.83--86, 18--20 November, Kyoto, Japan, 2009
Publications